串行通信详解:单工、半双工与全双工
需积分: 10 114 浏览量
更新于2024-10-08
收藏 266KB DOC 举报
"串口通信的基本知识"
串口通信是一种常用的数据传输方式,尤其在嵌入式系统和工业控制领域中广泛应用。它以较低的成本和简单的设计实现了数据的位序列传输,尽管速度相对较慢,但在长距离通信和设备连接方面具有优势。与之相比,并行通信虽然传输速度快、效率高,但需要更多的数据线,使得成本增加。
在串行通信中,数据的传输主要有三种形式:
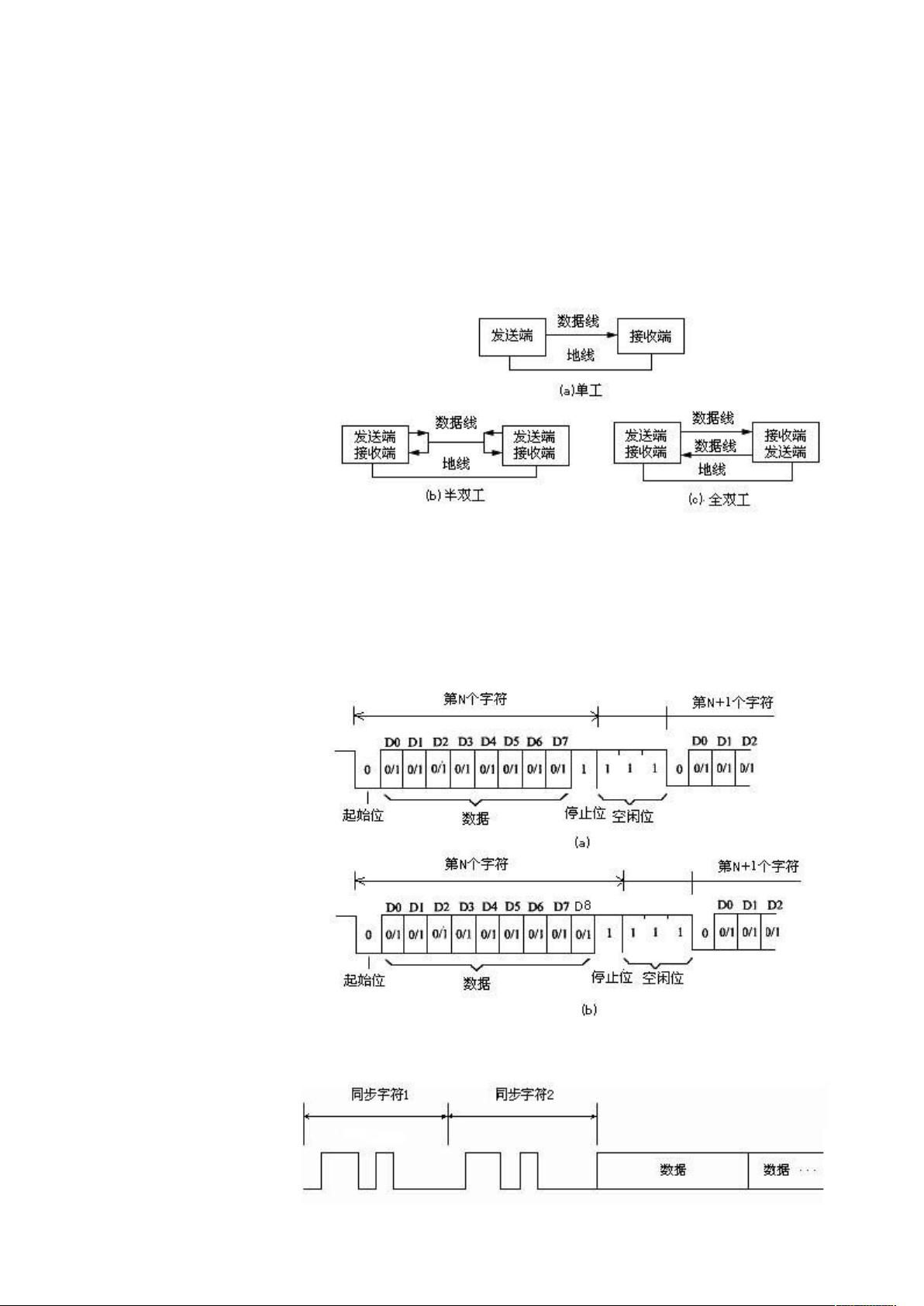
1. 单工(Simplex):数据传输是单向的,即数据只能从发送端流向接收端,不能反向传输。例如,计算机向打印机发送数据就是典型的单工通信,因为打印机无法向计算机回传数据。
2. 半双工(Half-duplex):这种形式允许双向通信,但不能同时发送和接收数据,必须分时进行。半双工通信可以使用一条或两条数据线,取决于数据流的方向切换是否需要物理线路的改变。
3. 全双工(Full-duplex):全双工通信支持双向同时传输数据,因此需要两条数据线。例如,电话线通信就是全双工,用户可以同时说话和听取对方的声音。
串行通信还分为两种基本通信方式:
1. 异步通信:异步通信使用起始位(0)和停止位(1)来标识数据帧的开始和结束,通常还包括奇偶校验位。例如,一个常见的帧格式包括1位起始位、8位数据位和1位停止位,有时数据位可以扩展到9位,用于区分地址和数据帧。帧之间的间隔可以自由调整,填充以空闲位(1)。
2. 同步通信:同步通信不依赖于起始位和停止位来同步数据,而是通过连续的数据包或者同步字符来保持接收端和发送端的时钟同步。这种方式常用于高速数据传输,例如在局域网中。
在微控制器如89S52中,串行通信的配置和管理是通过特定的寄存器和中断机制实现的,用户可以通过编程设置波特率、数据位数、奇偶校验以及停止位数量,以适应不同的通信需求。在实际应用中,串口通信常用于连接传感器、显示器、GPS模块等外部设备,是物联网和嵌入式系统中的重要接口之一。
8.1 串行通信基本知识
8.1.1 串行通信基本概念
串行通信的特点是:数据是按位的顺序进行传送,最少只需一根传输线即可完成,成本低但速度慢。计算机与外界的数据传
送大多数是串行的,其传送的距离可以从几米到几千公里。并行通信的特点是:各数据位同时传送,传送速度快、效率高。
但并行数据传送有多少数据位,就需多少根数据线,因此传送成本高。
串行数据通信共有以下几种数据通路形式。
1.单工(Simplex)形式
单工形式的数据传送是单向的。通信双方中一方固定为发送端,另一方则固定为接收端。单工形式的串行通信,只需要一条
数据线。如图 8.1(a)所示。例如计算机与打印机之间的串行通信就是单工形式,因为只能是计算机向打印机传送数据,而不
可能有相反方向的数据传送。
2.半双工(Half-duplex)形式
半双工形式的数据传送也是双向的 。
但任何时刻只能由其中的一方发送
数据,另一方接收数据。因此半双
工形式既可以使用一条数据线,也
可以使用两条数 据线。如 图 8.1(b)
所示。
3.全双工(Full-duplex)形式
全双工形式的数据传送是双向的,
且可以同时发送和接收数据,因此
全双工形式的串行通信需要两条数
据线。如图 8.1 (c)所示。
图 8.1 串行通信的数据通路形式
8.1.2 串行通信基本通信方式
按照串行数据的同步方式,串行通信可分为异步通信方式和同步通信方式。
1.异步通信方式
异步通信用起始位“0”表示字符的开始,然后由低位到高位逐位传送数据,最后用停止位 “1”表示字符结束,见图 8.2。异步
通信数据传送按帧传送。图 8.2(a)中一帧信息包括 1 位起始位、8 位数据位和 1 位停止位。图 8.2(b)中数据位增加到 9
位。在 89S52 中,第九位数据 D8 既可以用作奇偶校验位,也可以用作地址/数据帧标志,D8=1 表示该帧信息传送的是地址,
D8=0 表示传送的是数据。两帧信息之间可以无间隔,也可以有间隔,且间隔时间可任意改变,间隔用空闲位“1”来填充。
图 8.2 异步通信的数据格式
帧(frame ):从起始位开始到停
止位结束的全部内容称之为一帧,
帧是一个字符的完整通信格式,因
此也就把串行通信的字符格式称之
为帧格式。
起始位:发送器是通过发送起始位
而开始一个字符的传送。起始位使
数据线处于逻辑“0”状态。
数据位:起始位之后就传送数据位 。
在数据位中,低位在前(左),高
位 在 后 ( 右 ) 。 数 据 位 可 以 是
5、6、7 或 8 位。
奇偶校验位:用于对字符传送作为
正确性检查。共有 3 种可能,即奇
校验、偶校验和无校验。
停止位:停止位在最后,用以标志
一个字符传送的结束,它对应于逻
辑“1”状态。停止位可能是 1、1. 5
或 2 位。
在实际应用中通信的双方根据需要,在通信发生之前确定上述内容。
2.同步通信方式
在 同 步 通 信 中 , 每 一 数 据 块
开 头 时 发 送 一 个 或 两 个 同 步
字 符 , 使 发 送 与 接 收 双 方 取
得 同 步 。 数 据 块 的 各 个 字 符
间 , 取 消 了 每 一 个 字 符 的 起
始 位 和 停 止 位 , 所 以 通 信 速
度 得 以 提 高 , 见 图 8.3 。 同 步
通 信 时 , 如 果 发 送 的 数 据 块
下载后可阅读完整内容,剩余8页未读,立即下载
2022-05-04 上传
2015-10-31 上传
2011-01-08 上传
2023-02-20 上传
2023-02-20 上传
2021-09-23 上传










