Bayesian方法在时变延时估计中的研究与应用
185 浏览量
更新于2024-08-29
收藏 250KB PDF 举报
“研究了贝叶斯估计在时变延迟估计中的应用,该技术在阵列信号处理中至关重要。已存在多种成熟的算法,可以根据不同场景转化为自适应滤波器系数的估计,基于自适应滤波器的参数模型。扩展卡尔曼滤波器(EKF)、无迹卡尔曼滤波器(UKF)和Bootstrap粒子滤波器的贝叶斯方法仿真表明,在高斯非线性系统中,EKF和UKF表现良好。”
本文探讨的是时变延迟估计这一关键技术在阵列信号处理中的研究,它是许多通信和信号处理系统的基础。时变延迟估计通常涉及到对信号到达不同接收器的时间差进行精确测量,这对于定位、跟踪、干扰抑制等应用至关重要。阵列信号处理利用多个传感器的数据来提高信号检测和参数估计的性能。
传统的时变延迟估计方法通常依赖于线性和静态假设,但在实际复杂环境中,这些假设往往不成立。因此,研究者转向了贝叶斯估计理论,这是一种能处理非线性、非高斯噪声和动态系统的方法。贝叶斯方法通过结合先验知识和观测数据,给出关于未知参数的后验概率分布,从而提供更稳健的估计。
文中提到了三种贝叶斯估计方法:扩展卡尔曼滤波器(EKF)、无迹卡尔曼滤波器(UKF)和Bootstrap粒子滤波器。扩展卡尔曼滤波器是卡尔曼滤波在非线性系统上的扩展,通过线性化非线性函数来近似系统动态。无迹卡尔曼滤波器则采用少数关键样本(也称“ sigma 点”)来近似非线性函数,减少了EKF线性化误差。Bootstrap粒子滤波器,又称为蒙特卡洛滤波,是一种基于随机抽样的滤波器,特别适用于高维和非线性系统的状态估计。
仿真结果表明,在高斯非线性系统下,EKF和UKF都能有效地估计时变延迟。这归功于它们能够处理非线性问题的能力,尽管EKF可能受到线性化误差的影响,而UKF通过无迹变换减少了这种误差。Bootstrap粒子滤波器在处理复杂系统时可能更加灵活,但通常需要更多的计算资源。
这篇研究论文深入研究了贝叶斯估计方法在时变延迟估计中的潜力,尤其是在处理非线性和动态环境时。通过比较不同滤波器的性能,可以为实际应用选择合适的技术,提高信号处理的准确性和鲁棒性。对于未来的研究,可能包括探索更高效粒子滤波算法、优化滤波器性能以及将这些方法应用于新的应用场景,如无线通信、雷达探测和遥感等领域。
Research
Research
Research
Research on
on
on
on Bayesian
Bayesian
Bayesian
Bayesian E
E
E
E stimation
stimation
stimation
stimation of
of
of
of T
T
T
T ime
ime
ime
ime -
-
-
- varying
varying
varying
varying D
D
D
D elay
elay
elay
elay
Meng Wang
1
Ying Liu
2
Ji-wang Zhang
3
1 ,2,3 Department of Electrical Information Engineering, University of Beijing Transportation , Beijing , C hina
( 301074005 @ qq.com )
Abstract -
Time
Time
Time
Time delay
delay
delay
delay estimation
estimation
estimation
estimation is
is
is
is one
one
one
one of
of
of
of key
key
key
key techniques
techniques
techniques
techniques for
for
for
for a
a
a
a rray
rray
rray
rray s
s
s
s ignal
ignal
ignal
ignal p
p
p
p rocessing
rocessing
rocessing
rocessing ,
,
,
, and
and
and
and it
it
it
it has
has
has
has already
already
already
already had
had
had
had several
several
several
several
mature
mature
mature
mature algorithm
algorithm
algorithm
algorithm s.
s.
s.
s. A
A
A
A ccording
ccording
ccording
ccording to
to
to
to its
its
its
its different
different
different
different scenes,
scenes,
scenes,
scenes, time
time
time
time delay
delay
delay
delay estimation
estimation
estimation
estimation can
can
can
can be
be
be
be transferred
transferred
transferred
transferred t
t
t
t o
o
o
o the
the
the
the estimation
estimation
estimation
estimation of
of
of
of
coefficients
coefficients
coefficients
coefficients of
of
of
of a
a
a
a daptive
daptive
daptive
daptive f
f
f
f ilte
ilte
ilte
ilte
r,
r,
r,
r,
which
which
which
which is
is
is
is on
on
on
on the
the
the
the basis
basis
basis
basis of
of
of
of parameter
parameter
parameter
parameter model
model
model
model of
of
of
of a
a
a
a daptive
daptive
daptive
daptive f
f
f
f ilte
ilte
ilte
ilte
r.
r.
r.
r.
The
The
The
The simulation
simulation
simulation
simulation s
s
s
s of
of
of
of
Bayesian
Bayesian
Bayesian
Bayesian methods
methods
methods
methods including
including
including
including Extended
Extended
Extended
Extended Kalman
Kalman
Kalman
Kalman Filter,
Filter,
Filter,
Filter, Unscented
Unscented
Unscented
Unscented Kalman
Kalman
Kalman
Kalman Filter
Filter
Filter
Filter and
and
and
and Bootstrap
Bootstrap
Bootstrap
Bootstrap Particle
Particle
Particle
Particle Filter
Filter
Filter
Filter show
show
show
show
that
that
that
that under
under
under
under Gaussian
Gaussian
Gaussian
Gaussian nonlinear
nonlinear
nonlinear
nonlinear system,
system,
system,
system, EKF
EKF
EKF
EKF and
and
and
and UKF
UKF
UKF
UKF can
can
can
can estimate
estimate
estimate
estimate time-varying
time-varying
time-varying
time-varying delay
delay
delay
delay effectively.
effectively.
effectively.
effectively. B
B
B
B esides,
esides,
esides,
esides,
algorithm
algorithm
algorithm
algorithm s
s
s
s of
of
of
of UKF
UKF
UKF
UKF perform
perform
perform
perform better
better
better
better than
than
than
than that
that
that
that of
of
of
of EKF,
EKF,
EKF,
EKF, which
which
which
which are
are
are
are only
only
only
only subject
subject
subject
subject to
to
to
to Gaussian
Gaussian
Gaussian
Gaussian system.
system.
system.
system. In
In
In
In the
the
the
the nonlinear
nonlinear
nonlinear
nonlinear
non-Gaussian
non-Gaussian
non-Gaussian
non-Gaussian system
system
system
system ,
,
,
, BSPF
BSPF
BSPF
BSPF is
is
is
is able
able
able
able to
to
to
to estimate
estimate
estimate
estimate time
time
time
time delay
delay
delay
delay exactly.
exactly.
exactly.
exactly.
Key words:
T
T
T
T ime
ime
ime
ime delay
delay
delay
delay estimation;
estimation;
estimation;
estimation; Extended
Extended
Extended
Extended Kalman
Kalman
Kalman
Kalman Filter;
Filter;
Filter;
Filter; Unscented
Unscented
Unscented
Unscented Kalman
Kalman
Kalman
Kalman Filter;
Filter;
Filter;
Filter; Bootstrap
Bootstrap
Bootstrap
Bootstrap Particle
Particle
Particle
Particle Filter
Filter
Filter
Filter .
.
.
.
I. Introduction
Time delay , which is resulted by different
transmission distance of signals, refers to the time
difference accepted by different homologous receivers.
T he earliest method of time delay estimation is
Generalized Cross Correlation (GCC) algorithm put
forward by Knapp and Carter in 1976
[1]
.
Traditional methods of time delay estimation like
GCC algorithm and higher order cumulant approach c an
effectively estimate fixed delay under certain
circumstance s
[2]
. N evertheless, Extended Kalman Filter
(EKF) and Unscented Kalman Filter( UKF ) that adopts
Unscented Transformation (UT) are widely used in
location and tracking in nonlinear dynamic system. EKF
achieves fil tering by first-order linearization (Taylor
series expansions), which inevitably results in extra error
and leads to divergence in strong nonlinear system
[3]
.
UKF applies u nscented transformation so as to transfer
mean and covariance nonlinear ly and substitute s Jacobian
matrix of EKF with simple mathematics
[4]
.
UKF algorithm is of high precision , but it can only
be used in the system that noise obeys Gaussian
distribution . A s a sub-optimal estimation algorithm ,
particle filter is commonly applied in nonlinear and
non-Gaussian system s. T he thesis simulates EKF, UKF
and particle filter and analyzes their performance
according to different scenes, producing relatively good
estimation.
Ⅱ . Signal model of time delay estimation
A ssuming that s(t) represents signals from the same
mobile transmitter , then at t, the signals received by two
independent base stations can be formulated a s follows:
( ) ( ) ( )
( ) ( )( ) ( )
⎩
⎨
⎧
+−=
+=
tvttAstr
tvtstr
22
11
τ
(1)
____________________
Grant No. 61172130
I n order to facilitate analysis, the said formula is
simplified . A is amplitude ratio ;
( )( )
ttS τ
−
stand s fo r
delayed signal;
( )
tτ
denotes time-varying delay; v1(t) and
v2(t) refer to noise interference of tow signals, which is
assumed to be independent Gaussian white noise.
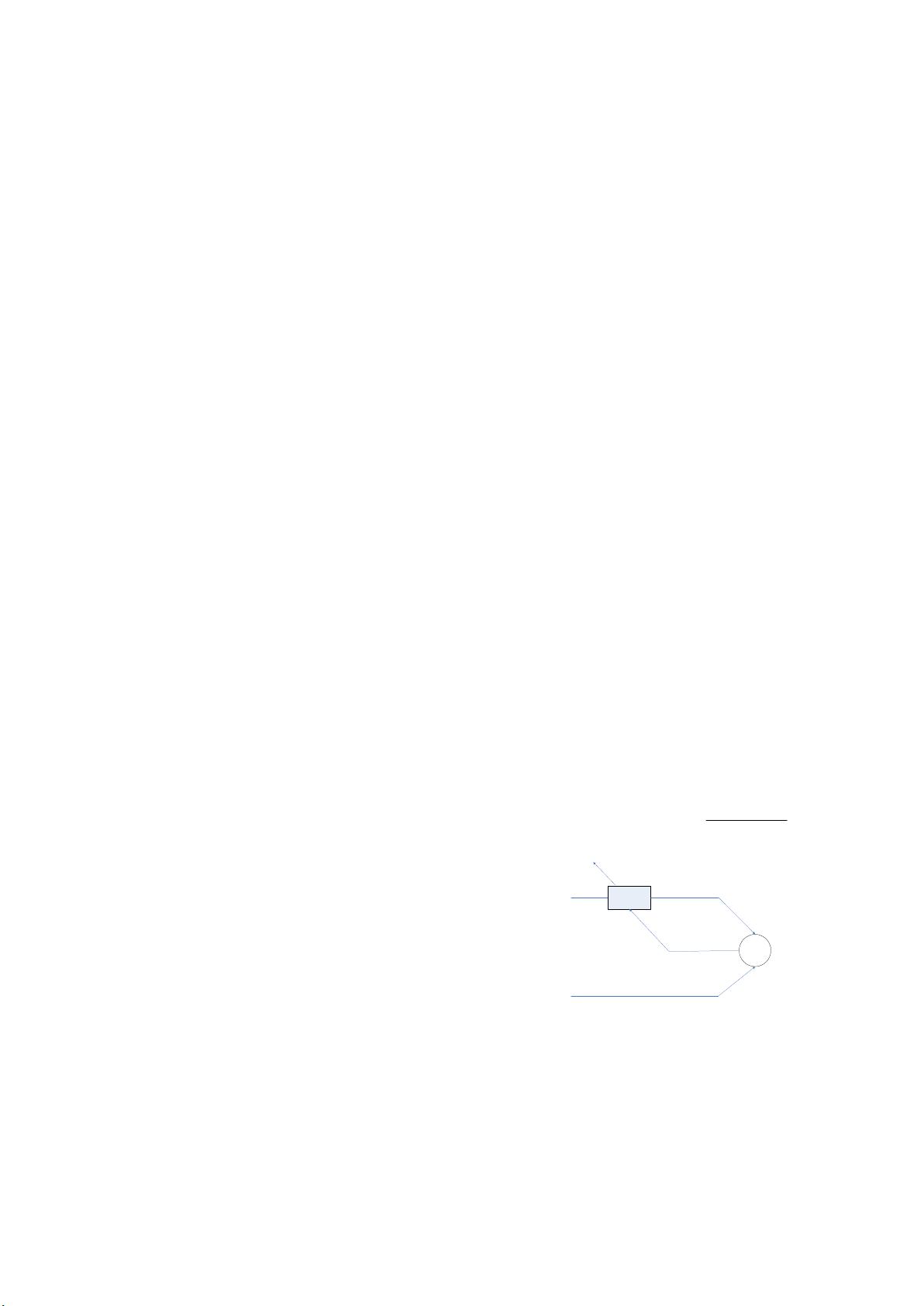
B y using parameter model of a daptive f ilte
r,
the
problem of time delay estimation can be resolved by the
procedure presented in figure 1
[5]
. r
1
(k) and r
2
(k) are
samples of r
1
( t ) and r
2
( t ) . If s ampling time T= Δδ , output
of FIR filter is:
( ) ( )
∑
−=
−=
p
pi
i
ikrkz
1
ξ
∞→
p
(2)
The m inimum quadratic sum of error e(k)=z(k)-r2(k )
can be achieved by adjustment of ξ . I f r
1
(t) and r
2
(t) are
expressed as formula (1), then in according with sampling
theorem ,e xpression is as follows:
( )( )
( )( )
( )( )
ki
ki
AkicA
i
τπ
τπ
τξ
−
−
=−=
sin
sin
(3)
FIR
1
()
rk
∑
2
()
rk
()
ek
1
()()
p
i
ip
zkrki ξ
=−
=−
∑
-
+
Fig .1. B lock diagram for adaptive estimation of two time delays
I n practice, with tolerance for certain truncation error ,
error can be basically ignored , as long as p is larger than
maximum time delay
( )
max
kτ
, for
instance
( )
[ ]
5
max
+>
kp τ
,the error can be basically
ignored. B y this way, process of estimation becomes less
complicated without consider ing signal s
’
waveform .
下载后可阅读完整内容,剩余4页未读,立即下载
138 浏览量
2021-02-11 上传
2021-02-06 上传
224 浏览量
112 浏览量
2020-01-10 上传
165 浏览量
189 浏览量
402 浏览量

weixin_38714761
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Oracle数据库在MSCS+FailSafe双机集群中的HA实践总结
- 一站式单点登录:提升效率与安全保障
- RF模组设计与应用探讨
- JSP实现注册验证码的详细步骤与源代码示例
- RF模块与C语言设计:优化信号接收与解决发射问题
- R初学者指南:中文版2.0
- FPS200指纹传感器驱动的USB便携式采集仪设计详解
- Linux新手管理员完全指南:中文译本
- 数据结构:串操作实现详解
- 数据结构模拟试题B:栈、队列与线性表解析
- Vista系统下MySQL安装全攻略
- CC2430系统级芯片:2.4GHz IEEE 802.15.4与ZigBee应用解决方案
- iReport使用教程:从入门到精通
- OpenSPARC Internals深度解析
- 形式语言与自动机习题解答:第3、5章关键题
- Sybase 15系统管理第二卷:中文实战手册
