ARM交叉环境配置详解及步骤图解
需积分: 7 183 浏览量
更新于2024-09-16
收藏 150KB DOC 举报
本文档详细介绍了ARM交叉环境的配置过程,包括以下几个关键步骤:
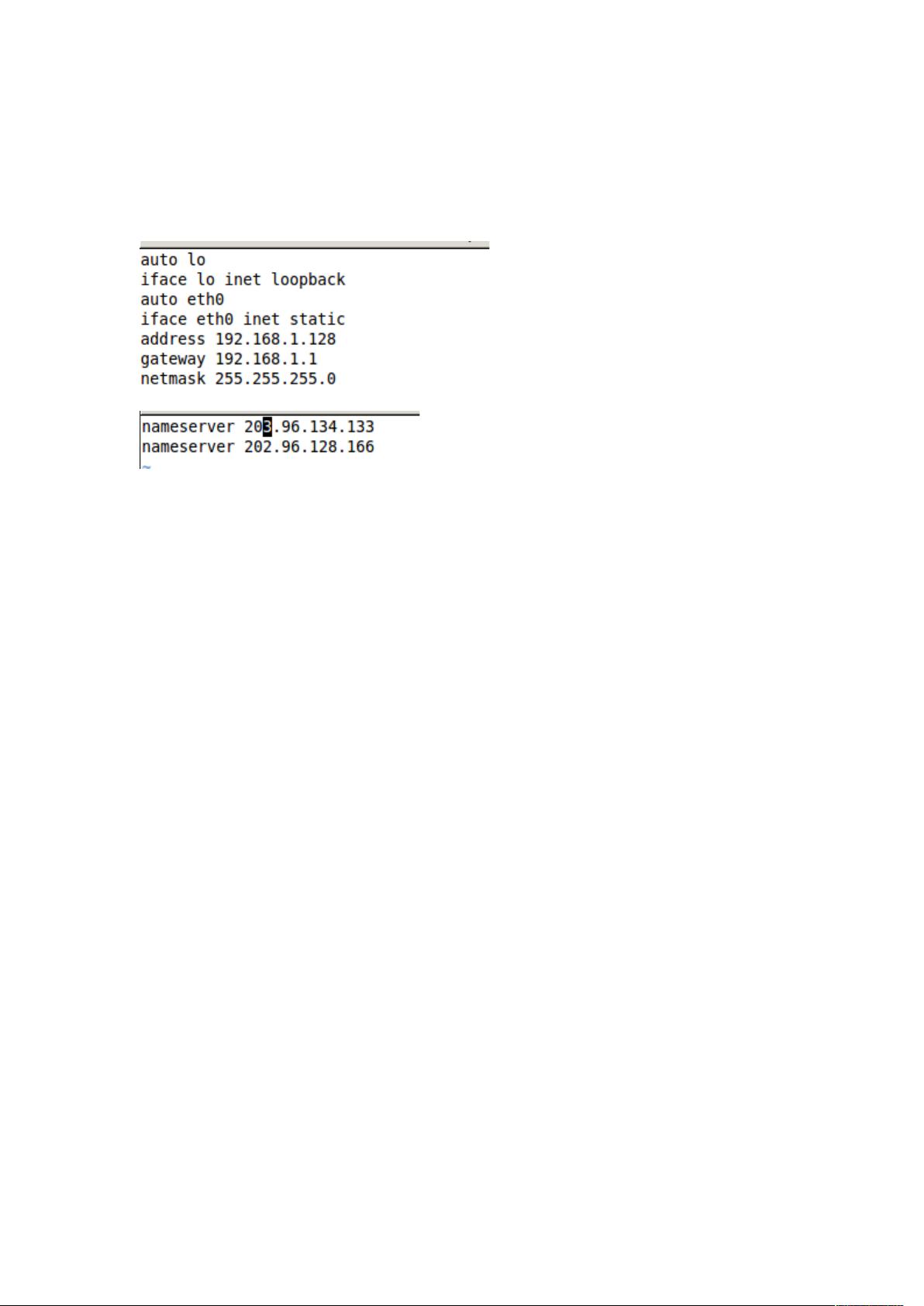
1. **网络配置**:
- 首先,设置虚拟机(VM)的IP地址,确保它能与主机进行通信。接着,安装并启用SAMBA(共享文件系统)和TFTP(简单文件传输协议)服务,以及SSH(安全外壳协议)以方便后续文件传输。
- 使用Samba将U-Image镜像拷贝到宿主机的/tftpboot目录下,便于ARM板子的引导。
2. **软件包安装和解压**:
- 将filesystem.tar.bz2解压到/opt目录,这是为了安装操作系统文件。
- 下载并解压toolchains_for_s3c2410.tar.bz2,该工具链用于在宿主机上构建ARM目标代码。解压后,找到交叉工具链的可执行文件路径:/opt/crosstool/gcc-3.4.5-glibc-2.3.6/arm-linux-gnu/bin。
3. **配置环境变量**:
- 修改环境变量PATH,添加交叉工具链目录,使其在shell启动时自动搜索。通过`vi.bashrc`文件完成这一操作,最后保存并执行`source ~/.bashrc`使改动生效。
4. **交叉编译C代码**:
- 在/opt/filesystem中创建一个bin_arm目录,用于存放编译后的ARM可执行文件。
- 使用预配置的交叉工具链(如Arm-linux-gnu-gcc)编译源代码(例如test.c),生成test_arm可执行文件。
5. **ARM板子配置**:
- 通过串口线连接ARM板,确保波特率、数据位、停止位和校验方式等设置与PC上一致。
- 启动ARM板,进入设置界面,通常需要在提示消息出现时按下Enter或空格键进行交互。
- 自定义UBOOT参数,这可能涉及对固件的配置以满足特定需求。
在整个过程中,作者提供了丰富的图示指导,有助于读者理解每个步骤。遇到的问题和解决方案也进行了分享,对于初次接触ARM交叉环境配置的新手来说,这是一个实用且详细的教程。
一. 网络配置
1. 设置 VM, IP 地址,使它能正常跟 主机通信。并安装,启用 SAMBA,TFTP ,SSH 相关服
务
2.通过 samba,将 uImage 拷贝到/tftpboot 目录下
3. 将 filesystem.tar.bz2 解压到/opt/目录下
5.通过 samba 将 toolchains_for_s3c2410.tar.bz2 拷贝到/opt 目录下
a) 解压 toolchains_for_s3c2410.tar.bz2:
b) tar –jxvf toolchains_for_s3c2410.tar.bz2
c) cd crosstool/gcc-3.4.5-glibc-2.3.6/arm-linux-gnu/bin/
d) pwd 命令获取交叉工具链可执行文件存放的绝对路径/opt/crosstool/gcc-3.4.5-glibc-
2.3.6/arm-linux-gnu/bin
e) 修改环境变量 PATH 的值
f) cd ~
g) sudo vi .bashrc
h) 在最后一行中添加:
i) ExportPATH=$PATH: /opt/crosstool/gcc-3.4.5-glibc-2.3.6/arm-linux-gnu/bin
j) 保存退出
k) 执行命令:source ~/.bashrc
6.使用交叉工具链编译 c 代码 (跳到 ARM 板配置,ARM 板配置好后,再跳到这一步)
比如有 test.c
Arm-linux-gnu-gcc test.c –o test_arm
7.在/opt/filesystem 中新建一个文件夹,专门用来存放交叉编译后的可执行代码
cd /opt/filesystem
mkdir bin_arm
将我们之前编译好的 test_arm 拷贝到/opt/filesystem/bin_arm 中,在开发板的终端中 ,即
putty(串口),运行 test_arm
下载后可阅读完整内容,剩余4页未读,立即下载
2010-09-28 上传
2016-10-11 上传
2012-10-17 上传
2012-04-06 上传
277 浏览量
2022-11-25 上传
2021-09-29 上传
点击了解资源详情
点击了解资源详情

lyf_1203
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
