基于余弦定理的无人机无源定位模型研究
需积分: 5 115 浏览量
更新于2024-08-04
收藏 608KB PDF 举报
"无人机无源定位、余弦定理算法"
本文主要探讨的是在无人机集群编队飞行中,如何利用无源定位技术调整无人机位置,以保持编队队形。核心算法是基于余弦定理的定位模型。在这个模型中,无人机不会主动发射电磁波,而是通过接收其他无人机发射的信号,根据信号之间的角度信息来确定自身位置。
首先,要理解无源定位的基本原理。当无人机A、B和C分别发射信号,无人机D接收到这些信号,形成三个角度𝛼1、𝛼2、𝛼3(如图1.1所示)。通过余弦定理,可以计算出无人机D相对于发射信号的无人机的坐标(x, y)。余弦定理公式为c² = a² + b² - 2ab cos(C),其中a、b分别为两边长度,c为斜边长度,cos(C)为对应夹角的余弦值。在本问题中,夹角就是接收信号无人机与发射信号无人机之间的连线角度,边长可以通过无人机之间的相对距离推算。
对于第一小问,我们需要利用给定的角度阿尔法1、阿尔法2、阿尔法3构建余弦模型,解出无人机D的坐标。这一步涉及坐标系的设定和角度转换,确保角度信息能准确对应到二维平面上的位置。
第二小问引入了干扰因素,当有其他编号未知的无人机发射信号时,会对定位产生干扰。在这种情况下,我们需要分析接收信号的无人机所接受的方向信息,即夹角,判断它们是否真实反映了无人机D与FY00、FY01之间的相对位置。这可能需要排除掉因干扰产生的无效夹角,只保留可以用于定位的有效角度。
第三小问涉及到FY00和FY01的位置关系。假设FY00的位置已知且可以发射信号,而FY01的位置需要调整。最多可以选择圆周上的3架无人机和圆心上的1架无人机,共4架无人机形成信号发射群,通过之前建立的模型计算角度并定位。这个过程涉及到优化算法,以找到最佳的信号发射组合,从而实现对无人机位置的精确调整。
关键词中的“无源定位”是指不依赖自身发射信号来确定位置的技术,适用于需要保持电磁静默的情况。“余弦算法”是解决这个问题的关键工具,通过计算角度余弦来确定距离。而“无人机”则表明这种技术在无人航空器系统中的应用。
解决这一系列问题需要深入理解无源定位的理论,掌握余弦定理在几何定位中的应用,并具备处理干扰和优化算法的能力。在实际操作中,还需要考虑到无人机之间的相对位置固定不变,以及在特定环境下如何有效地进行信号传递和接收。
6
位于圆心的无人机 (FY00) 和编队中另 2 架无人机发射信号,其余位
置略有偏差的无人机被动接收信号。当发射信号的无人机位置无偏差且编号
已知时,建立被动接收信号无人机的定位模型。
2.某位置略有偏差的无人机接收到编号为 FY00 和 FY01 的无人机发
射的 信号,另接收到编队中若干编号未知的无人机发射的信号。若发射信
号的无人机位置无偏差,除 FY00 和 FY01 外,还需要几架无人机发射信
号,才能实现无人机的有效定位?
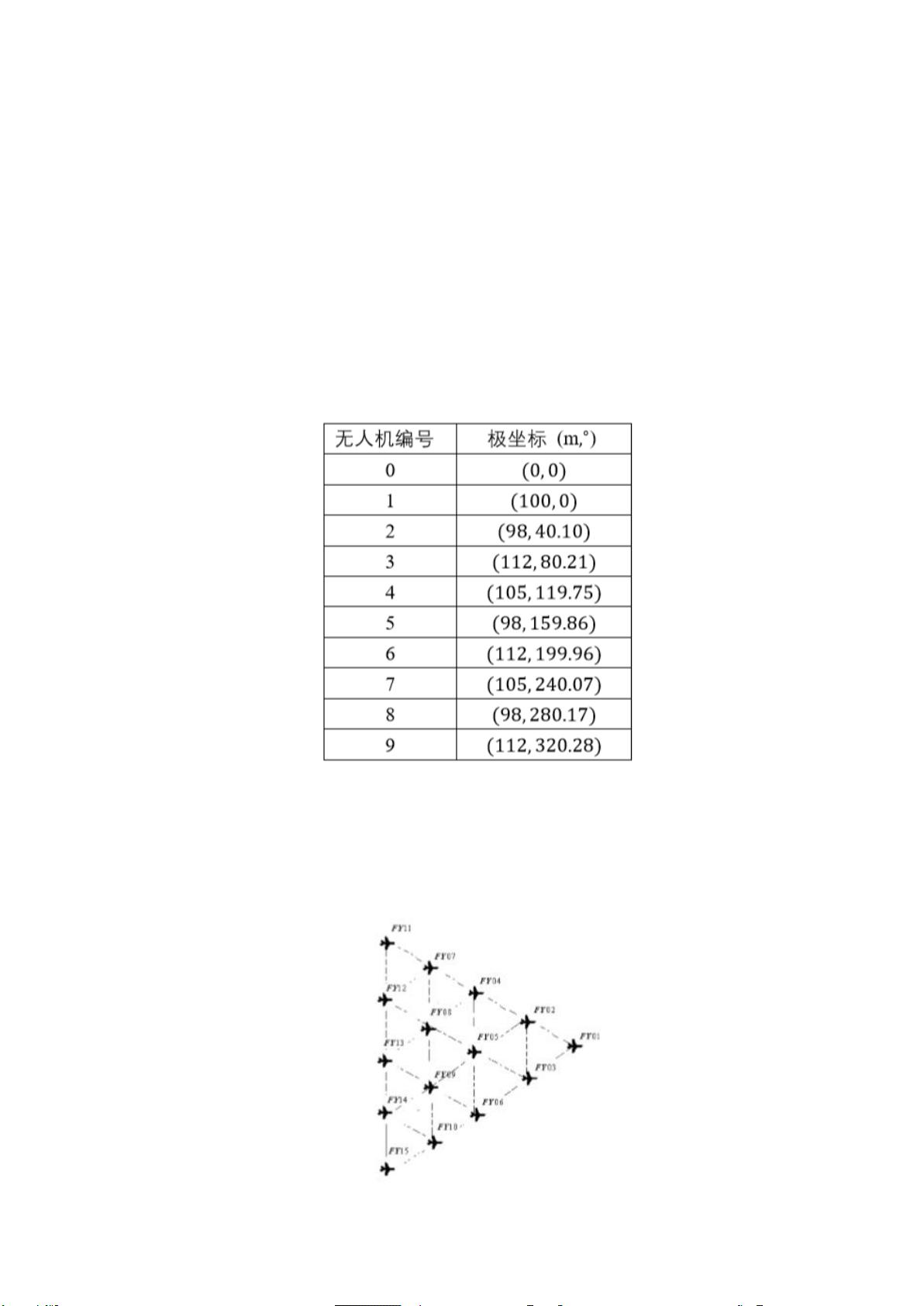
3.按编队要求,1 架无人机位于圆心,另 9 架无人机均匀分布在半径为
100 m 的圆周上。当初始时刻无人机的位置略有偏差时,请给出合理的无人
机位置 调整方案,即通过多次调整,每次选择编号为 FY00 的无人机和圆
周上最多 3 架无人机遂行发射信号,其余无人机根据接收到的方向信息,
调整到理想位置 (每次调整的时间忽略不计) ,使得 9 架无人机最终均匀
分布在某个圆周上。利用图 1.3.2 给出的数据,仅根据接收到的方向信息来
调整无人机的位置,请给出具体的调整方案。
图 1.3.2 无人机的初始位置
4.实际飞行中,无人机集群也可以是其他编队队形,例如锥形编队队形
(见图 1.3.3,直线上相邻两架无人机的间距相等,如 50 m) 。仍考虑纯方
位无源定位的情形,设计无人机位置调整方案。
剩余11页未读,继续阅读
167 浏览量
2022-06-03 上传
2022-06-07 上传
234 浏览量
424 浏览量
1163 浏览量
458 浏览量
211 浏览量
221 浏览量

tobeqr689
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- CSharp Language Specification 3.0 CN.doc
- Thinking in C++ 2nd edition Volume 2: Standard Libraries & Advanced Topics
- 网站制作项目的报价参考格式。
- Thinking in C++, Volume 1, 2nd Edition
- 实用最优化的搜索算法
- 第二章信息系统的开发.ppt(我整理的教学课件)
- LoadRunnerManual 帮助文件
- JAVA新手须知的常识
- ModalMaker中文手册
- 串口通讯各种编程大全
- [eBook] A Guide to MATLAB for Beginners and Experienced Users - B.R.Hunt,R.L.Lipsman,J.M.Rosenberg - (Cambridge University Press)
- 数据结构(内容很全很容易学习的一本书)
- GWT学习笔记,个人学习心得
- Linux内核模块和驱动的编写
- windows-powershell-in-action
- JSF标签全解释 `
