基于MEMS传感器的行人导航定位方法研究
PDF格式 | 361KB |
更新于2024-08-27
| 72 浏览量 | 举报
"基于MEMS传感器的行人导航定位方法研究"
随着微机电系统(Micro-Electro-Mechanical Systems, MEMS)传感器技术的发展,行人导航已成为一个热门的研究领域。该研究提出了一种仅使用垂直加速度计实现步态检测和步长估计的方法。通过结合加速度计和磁力计的数据,确定初始航向;然后利用陀螺仪通过捷联惯性导航算法计算后续的航向。最后,通过航位推算(Dead Reckoning)技术达成对行人的定位目标。
文章中详细阐述了如何利用MEMS传感器进行行人定位。首先,通过分析垂直加速度的变化,精确地识别行走中的每一个步伐,这是通过检测连续的加速度峰值和谷值来实现的。步长的估算则依赖于对每次步伐期间的位移计算,这通常涉及到对加速度信号的滤波和处理。在步长检测和步长估计的基础上,研究进一步利用加速度计和磁力计的数据来确定初始航向。加速度计提供静态和动态信息,而磁力计则用于提供地球磁场的方向,从而辅助航向的确定。
接下来,陀螺仪被用来持续跟踪行人的方向变化。由于陀螺仪不受外界环境影响,可以提供连续的角速度信息,这使得在行走过程中能够精确地更新航向。通过捷联惯性导航算法,将陀螺仪的数据整合到步态和初始航向的信息中,实时计算出行人的当前位置。
文章通过两次实地试验验证了该方法的有效性。实验结果显示,提出的行人定位方法具有较高的效率,且定位误差较小。这种方法的优势在于它不依赖于外部GPS或其他卫星导航系统,因此在城市峡谷、室内等GPS信号受限的环境中,仍能提供可靠的定位服务。
基于MEMS传感器的行人导航定位方法是一种创新的技术,它可以为智能穿戴设备、移动设备和物联网应用提供准确的个人定位能力,尤其在复杂的城市环境中具有很大的应用潜力。未来的研究可能会进一步优化传感器融合算法,提高定位精度,并探索更多应用场景。
Research for Pedestrian Navigation Positioning Method Based on MEMS
Sensors
XIONG Yunqiang
1
, ZHANG Yanshun
1
, WANG Zhan Qing
2
, LI Ming
1
1. College of Instrument Science and Opto-electronics Engineering, Beihang University, Beijing 100191, China
E-mail:yunqiangxiong@buaa.edu.cn, zhangyanshun@buaa.edu.cn, liliyalm@buaa.edu.cn
2. School of Automation, Beijing Institute of Technology, Beijing 100081, China
E-mail: bitwangzhanqing@163.com
Abstract: With the development of MEMS sensors, pedestrian navigation has been a popular research. The paper realizes step
detection and estimation for step length by only vertical accelerometer. It determines initial heading using accelerometers and
magnetometers and calculates latter heading using gyroscopes by strap-down inertial navigation algorithm. Afterwards, it
achieves the positioning goal for pedestrian using dead reckoning method. Definitively, the effectiveness of this approach is
demonstrated through two different field trials and the results indicate that the positioning method for pedestrian proposed is
efficient and has a small positioning error.
Key Words: MEMS, Pedestrian Navigation, Dead Reckoning
1 Introduction
Research for pedestrian navigation based on MEMS
sensors has been the popular study because MEMS inertial
sensors possess advantages of small volume and low cost and
weight.
[1-3]
Pedestrian navigation system is very helpful to
monitor location of firemen and the aged, offer navigation
service for blind persons and everyman. So a mass of
different researches have been carried on according to the
human body different parts mounted MEMS sensors.
[4-6]
Among them, kun-chan Lan
[7]
models step length using leg
length, height and proposes a waist-mounted pedestrian dead
reckoning. Pragun Goya
[8]
mounts MEMS sensors on the
body waist and calculates heading combining gyroscopes
with magnetometers to achieve the positioning goal for
pedestrian in a longer time. A.R.Jim´enez
[9]
and Seong Yun
Cho
[10]
proposes a foot-mounted pedestrian navigation
positioning method and adopts zero velocity update (ZUPT)
method to calibrate the sensors drift errors from the
accelerometers and gyroscopes.
It’s convenient to wear and possesses better reliability
when MEMS sensors are mounted on human body waist. For
the pedestrian navigation based on waist mounted MEMS
sensors, this paper studies the methods for step detection,
step length estimation only through a vertical accelerometer
and heading algorithm and carries out some researches of
pedestrian positioning method based on dead reckoning.
2 Pedestrian Navigation Positioning Principle
2.1 Dead Reckoning
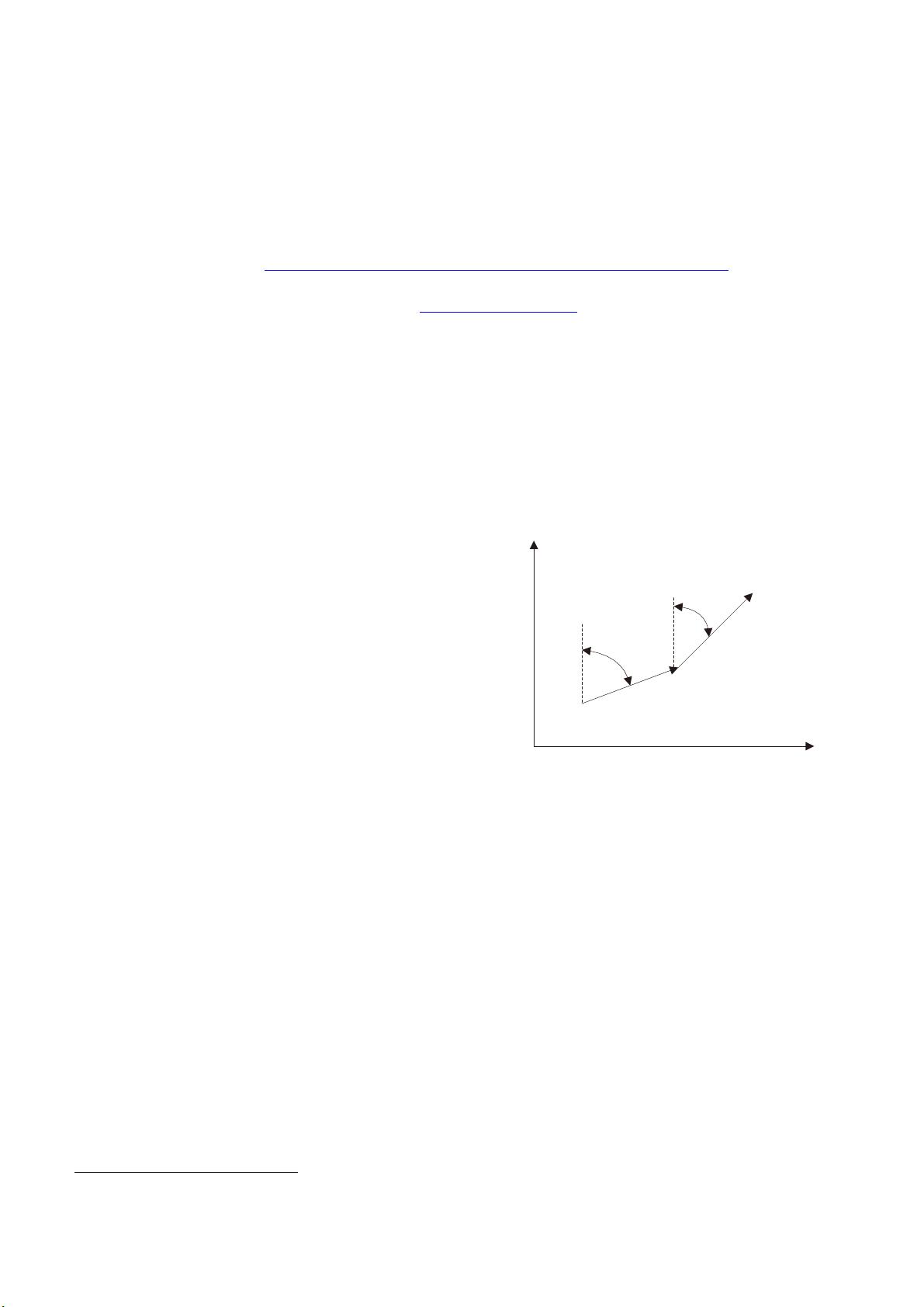
Dead Reckoning (DR) is a navigation method that reckons
next location by current location and velocity, direction and
time of motion. The method has advantages of full autonomy,
flexible and undisturbed and it is able to offer
two-dimensional position anytime and anywhere. The basic
This work is supported by National Natural Science Foundation (NNSF)
of China under Grant (61473019, 11202010 , 61273033).
principle of pedestrian dead reckoning positioning
[11]
is
shown in Fig. 1.
(
N
1
.
(
N
1
.
(
1
6/N
6/N
R
(1)k
\
k)
\
˄
Fig. 1: The principle of dead reckoning
Pedestrian locates
11
(, )
kk
EN
and heading is
(1)k
\
when time is
1
t
k
.The next step length is
(1)SL k
. It can
reckon the position of next moment
t
k
on the basis of the
equation (1). It can calculate the position of moment
t
k
using the initial position
00
(, )EN
, step length
(1)SL k
and
pedestrian’s heading according to equation (2).
1
1
SL( 1)*sin( ( 1))
SL( 1)*cos( ( 1))
°
®
°
¯
kk
kk
EE k k
NN k k
\
\
(1)
0
1
0
1
(-1 *sin( ( 1))
(-1 *cos( ( 1))
°
°
®
°
°
¯
¦
¦
k
k
i
k
k
i
EE SLi i
NN SLi i
\
\
˅
˅
(2)
Through the principle of dead reckoning, it can realize
self-localization for pedestrian under the condition of the
initial position information.
Proceedings of the 34th Chinese Control Conference
Jul
y
28-30, 2015, Han
g
zhou, China
5315
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐

94 浏览量
84 浏览量

weixin_38618312
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- CentOS7上Docker环境搭建与ELK+Elasticsearch部署指南
- JavaScript任务追踪工具task-track深度解析
- 个性黑色惊喜主题幻灯片模板下载
- EasyBCD Beta版发布:UEFI启动修复神器
- RexCrawler: Java多线程爬虫API的简易实现
- PyCharm中手动安装Flask-SQLAlchemy的离线解决方案
- AdonisJS 4.0创建简单博客教程与CRUD应用指南
- Angular开发与构建实践指南
- 腾讯短网址功能的简易网址压缩工具v1.0发布
- Struts框架应用实例:租房、宠物、学生管理项目分析
- 深入解析CSS在石丛林设计中的应用
- 情侣主题铁塔手链PPT模板下载
- STM32微控制器全面中文技术参考指南
- Java应用程序部署到Heroku的快速入门指南
- 2020年学习Spring Cloud实践案例:集成Spring Cloud Alibaba
- 商务必备:白色背景蓝色点缀5w管理法则PPT模板
