C8051F300微控制器驱动步进电机的高性能设计详解
需积分: 9 100 浏览量
更新于2024-07-22
1
收藏 553KB PDF 举报
本文档深入探讨了步进电机驱动的设计方法,包括软硬件方面的详细设计要点。首先,步进电机在众多领域有着广泛的应用,如消费电子(打印机、绘图仪、复印机和扫描仪)、汽车电子(电子节气门控制、仪表盘指示器和气候控制系统)、工业设备(机器人、电子元件处理机、测试设备和自动化生产线)等。这些应用强调了对高性能和精确控制的需求。
传统的步进电机控制系统往往依赖专用功能集成电路(Function ICs),这些IC提供了基础的前进和后退控制接口,但可能限制系统的性能和灵活性。为了提高系统性能,特别是在嵌入式系统中,采用微控制器直接控制步进电机是一种更优的选择。例如,像C8051F300这样的小型微控制器就能提供高性能的运动控制解决方案,它具备足够的计算能力和低功耗特性,能够实现精确的步进电机控制算法和实时响应。
在硬件设计方面,文档可能会涵盖以下几个关键部分:
1. **驱动电路**:这包括电流斩波器、功率放大器和隔离电路,用于将微控制器的信号转化为步进电机所需的电压和电流脉冲,确保电机顺畅运转。
2. **接口电路**:连接微控制器与步进电机之间的电路,可能包括接口芯片和接口协议,如SPI、UART或I2C,以实现数据交换和命令发送。
3. **保护措施**:如过载保护、过热保护和短路保护,以确保电机和整个系统安全运行。
4. **电源管理**:对于嵌入式系统,高效的电源管理和电池续航能力是必不可少的。
软件设计部分则会涉及:
- **电机控制算法**:基于脉冲宽度调制(PWM)或微步控制,精确控制电机转速和方向。
- **位置和速度控制**:通过编码器反馈或其他位置传感器实现闭环控制,确保电机按照预设路径移动。
- **错误检测和处理**:软件层面的错误检测机制,如检测丢步、超时和异常情况,并进行相应的处理。
- **通信协议**:如果涉及到与主机PC的交互,可能还会涉及网络协议,如USB、Ethernet或CAN总线的编程。
本设计文档为工程师提供了全面的指导,如何通过微控制器驱动设计实现高效、灵活且可靠的步进电机控制,适用于各种复杂和精确控制的场景。通过阅读和学习文档中的电路图、软件代码示例,读者可以深入了解并应用于自己的项目中。
AN155
Rev. 1.1 7
Solving Equation 3 for time gives the results shown in
Equation 4. This is the absolute time required to provide
a linear acceleration profile. This would be useful if we
were working in absolute time and scheduling each
commutation point based on a cumulative count from
the beginning. However, we would like to use a relative
count for each step period.
Equation 4.
The definition of the step period from Equation 1 is used
with the results in Equation 4 to provide an equation for
the step period listed in Equation 5. The constant
acceleration term has been factored out and is called T
0
as defined in Equation 6. The value of T
0
will determine
the step period of the initial step with n equal to zero.
Thus, we can use a single table for the relationship and
let T
0
be a variable. This means one table can be used
with any stepper motor.
Equation 5.
Equation 6.
3.6. Common Mistakes
As demonstrated in the preceding section, the linear
velocity profile is not as simple as it would first appear.
The values stored in the linear velocity table must
closely follow the non-linear equation shown in
Equation 5. Often engineers in a hurry to get hardware
up and running do not use the proper relation for the
stepper motor table. This is a very common mistake that
is very easy to make.
The most common mistake is to have the step period
decrease linearly with the step number. For example,
one might have an initial step period of 256 timer ticks
and decrease the step period by one each time. This
results in a non-linear velocity that is increasing
hyperbolically as the step period approaches zero. Such
a profile will hardly move at first and then the velocity
will increase much too quickly.
The second most common mistake is to have the step
period decrease with the inverse of the step number.
This results in a velocity that is linear with respect to the
step number. But this ignores the fact that the step
period is constantly changing. The velocity should be
plotted against the cumulative time, not the step
number. If the velocity is plotted against the absolute
time, the resulting curve is a second order function. That
is, the velocity is increasing with the square of time. This
profile also starts out too slow and ends up accelerating
too fast.
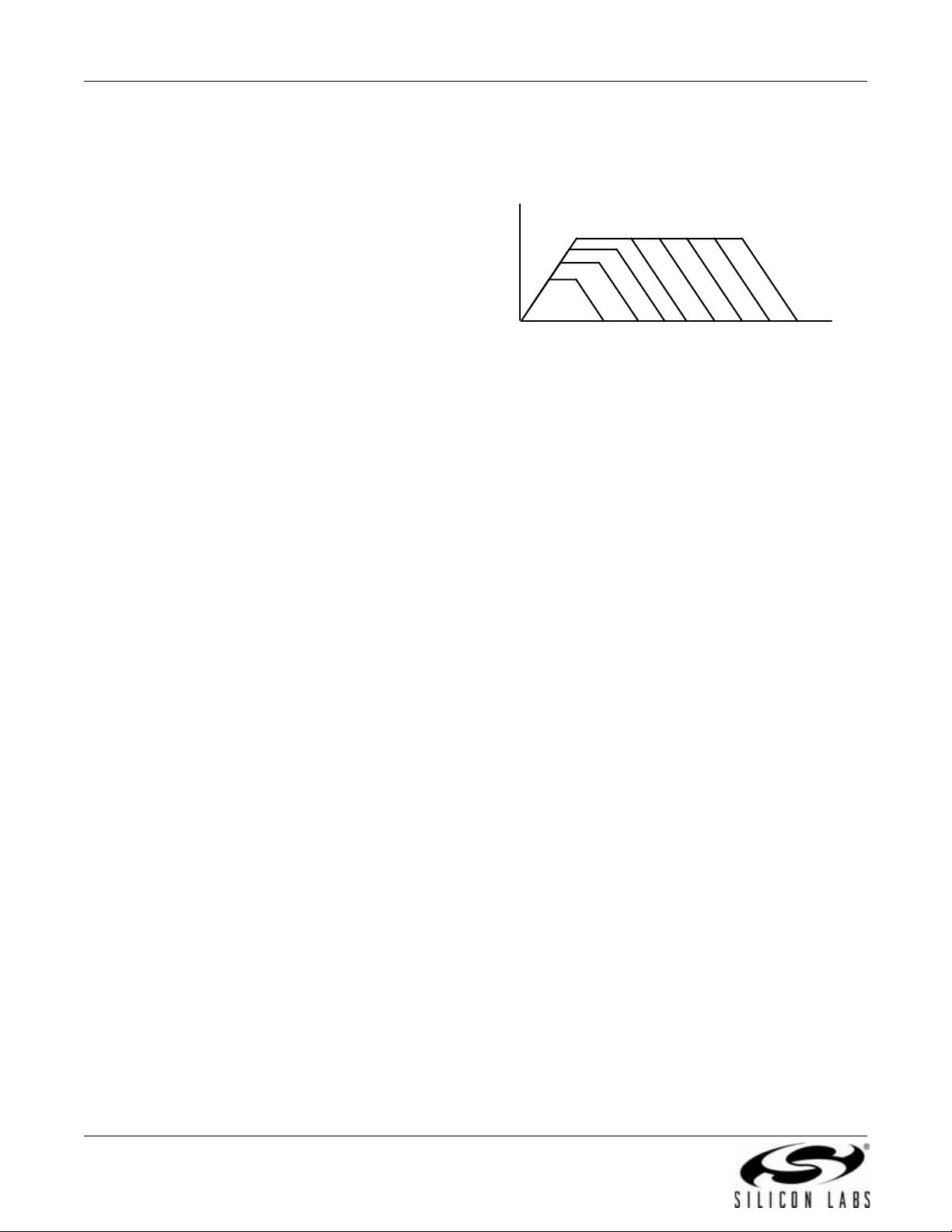
3.7. Linear-Velocity vs. Linear-Acceleration
Many engineers hold a preconceived notion that a forth-
order linear-acceleration profile will provide much better
dynamic performance than a linear velocity profile. A
linear-acceleration order profile has an acceleration that
is trapezoidal in nature and velocity shaped in an s-
curve.
A linear-acceleration profiler provides only marginally
better dynamic performance in some systems. Only a
few applications can actually benefit from a forth-order
profile. For example, a printer head driven by an elastic
band might benefit from the improved smoothness. The
linear-acceleration profiler will have a smoother
transition between the acceleration and slewing phases.
The maximum step rate is dictated by motor parameters
and will be the same in either case.
The linear velocity profile has several advantages over
the forth-order profile: The linear velocity profile can be
implemented using a single table. The step table is
fixed. It can use a single multiply function to provide a
variable acceleration. Using the table avoids having to
calculate complex functions like a square root.
Calculating the profile is very simple.
t
n
2n
α
------ -=
T
n
t
n1+
t
n
– T
0
n1+ n–()==
T
0
2
α
---=
剩余35页未读,继续阅读
146 浏览量
192 浏览量
103 浏览量
361 浏览量
243 浏览量
233 浏览量
155 浏览量

wei137a
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
