




超快半周期谐振追踪技术在电感耦合无线电力传输中的应用
138 浏览量
更新于2024-08-25
收藏 1.42MB PDF 举报
"这篇研究论文探讨了一种电感耦合无线电力传输系统(ICPT)中的半周期谐振跟踪技术,旨在解决调谐问题。该方法能在半个振动周期内完成谐振跟踪,通过同步工作频率至衰减自然频率来实现。论文详细阐述了无载和有载电路模型下的跟踪原理和跟踪误差理论,并且已经构建了原型进行验证。"
电感耦合无线电力传输(Inductively Coupled Wireless Power Transmission, ICPT)系统是现代无线充电技术的一种,它利用电磁感应原理实现能量的非接触式传递。在实际应用中,由于各种因素如负载变化、环境影响等,系统的谐振频率可能会发生变化,即发生“失谐”现象,这会显著降低传输效率。因此,谐振跟踪技术是ICPT系统中至关重要的一环,它可以实时调整系统参数以保持最佳传输状态。
本文提出了一种超快速的谐振跟踪方法,其特点是能够在半个振动周期内完成跟踪过程,极大地提高了系统的响应速度。这一创新之处在于将操作频率与系统在接近谐振频率处的衰减自然频率同步,这种方法能够有效地捕捉到谐振状态的变化,从而迅速调整工作状态,确保能量传输的高效性。
为了理解该方法的工作原理,论文深入分析了无载和有载电路模型。在无载情况下,电路没有负载电阻,谐振条件相对简单;而在有载情况下,负载电阻的存在会影响谐振条件和系统的动态行为。通过详细描述这两种情况下的跟踪原理,论文为理解和实现该方法提供了理论基础。
此外,论文还建立了跟踪误差理论,这是评估跟踪性能的关键。通过对跟踪误差的分析,可以预测和控制系统的稳定性,以及在实际应用中可能遇到的问题。误差理论的建立有助于优化设计,减少跟踪过程中可能出现的失真和效率损失。
最后,作者们构建了一个原型系统来验证所提出的半周期谐振跟踪方法。实验结果将证实理论分析的有效性,并可能揭示在实际应用中可能遇到的新挑战和解决方案。
这篇研究论文为电感耦合无线电力传输领域的谐振跟踪技术提供了一种新的高效解决方案,对于提升无线充电设备的性能和实用性具有重要意义。
0885-8993 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2693383, IEEE
Transactions on Power Electronics
IEEE TRANSACTION ON POWER ELECTRONICS
3
It should be noted that frequency adjustments would be
executed at every current zero-crossing point; therefore,
resonance tracking would be accomplished within one half of a
resonance cycle. However, a tracking error always exists
between the resonance and the damped natural frequency, and
this error will be evaluated in the next section.
B. Tracking Error Analysis in Unloaded Model
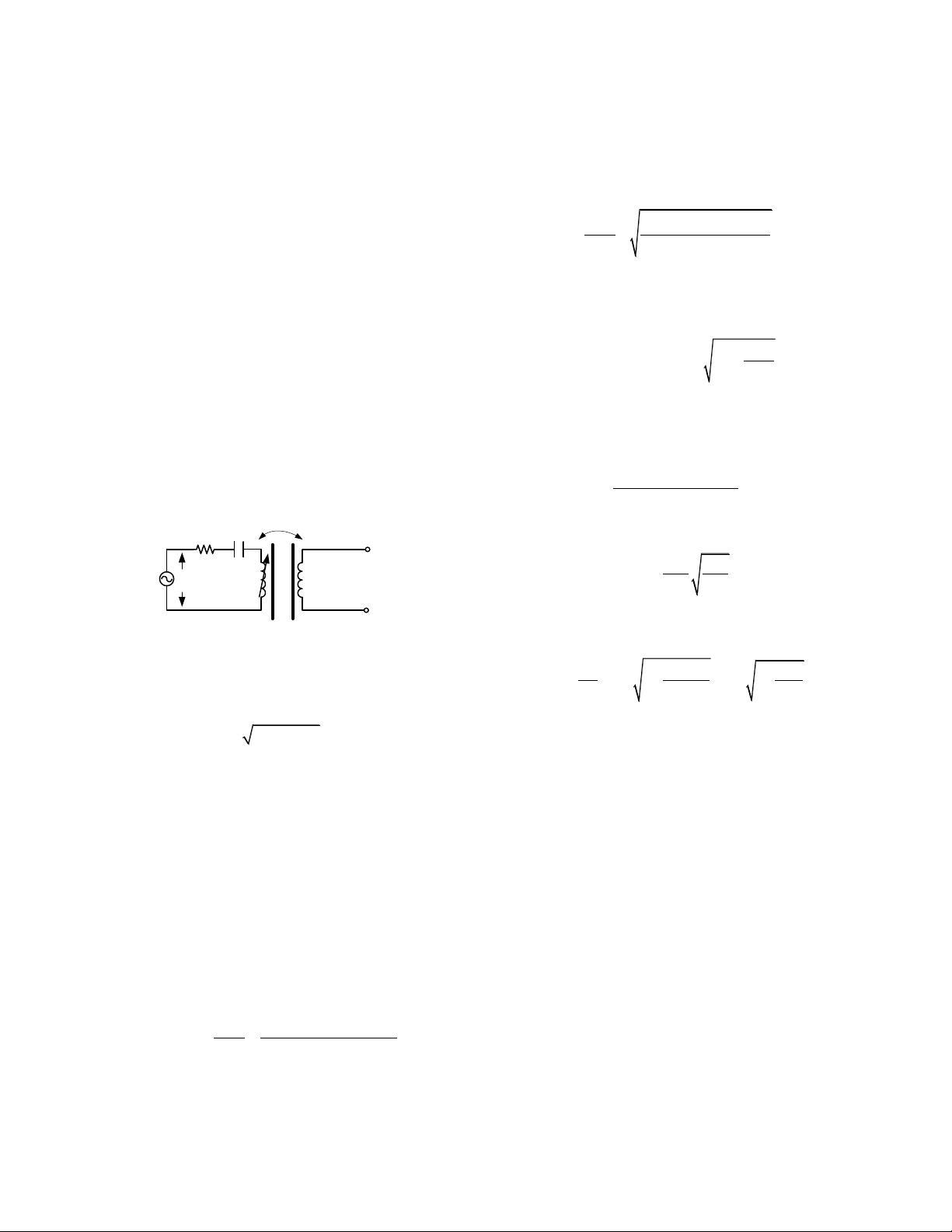
A simplified circuit model of a resonant ICPT system is
shown in Fig. 3. An AC chopper provides the power to be
transmitted to the receiver at an operating frequency of ω. The
transmitter is then configured in the form of a series resonant
loop to compensate the loosely coupled coils, where L
TX
is the
transmitting coil inductance, C
TX
is the series resonant
capacitor, and R
TX
is the total resistive loss, including the
source resistance, the radiation loss resistance, and the ESR
values of both the transmitting coil and the resonant capacitor.
Both transmitting and receiving coils are wounded on ferrite
core to increase the coupling coefficient K between them, the
displacement between the two coils would change the
equivalent inductance of L
TX
and will thus ultimately affect the
resonance frequency.
Transmitter
Receiver
K
V
s
R
TX
C
TX
L
TX
L
RX
Fig. 3. Circuit model of light-load ICPT system.
The resonance frequency is then given by
1/
Xo T TX
LC
(4)
The maximum induction voltage will be obtained in the
secondary coil when ω=ω
0
. The proposed tracking method will
track the damped natural frequency, and thus the difference
between the resonance frequency ω
0
and the damped natural
frequency ω
f
is investigated.
In the transmission loop, Kirchhoff’s voltage law (KVL)
equation is given by:
(1/ )
TX TX TX TX S
sC R sL I V
, (5)
where s is the complex number of the frequency parameter and
I
TX
is the loop current, which can be expressed as:
2
()
()
( ) 1
TX s
TX
TX TX TX TX
C sV
Ns
Is
D s s C L sC R
. (6)
The natural response of the system is therefore directly
determined by the roots of the denominator of Equation (6),
regardless of the input and the initial conditions of the circuit.
The characteristic equation is formulated as
2
(1 0)
TX TX TX TX
D s C R s C L s
, (7)
and the roots are
2
{
4
2
1,2
2
}.
k
TX TX TX TX
TX
TX TX TX
C R C L
L C L
k
R
(8)
ω
f
is determined by the imaginary part of these roots.
Therefore, it is given by
,
2
2
2
1 2 0
Im( )
4
T
f
X
TX
R
L
(9)
The oscillation maintaining condition of the transmitting
loop is obtained as:
2
4
0
2
TX TX TX TX
TX TX
C R C L
CL
, (10)
which is simplified to read
1
0.5
TX
TX TX
L
Q
RC
. (11)
Q is the quality factor of the resonance loop. The tracking
error is evaluated in the form
2
2
1
1 1 11
4
1
4
TX TX
TX
o
f
RC
QL
. (12)
Equation (9) indicates that the tracking error is solely
determined by the quality factor of the resonance loop. A
tracking error of less than 1% only requires Q > 3.6. The typical
quality factor of a general ICPT transmitter is more than 20; this
guarantees a tracking error of less than 0.12%, which is almost
negligible. This proves that the proposed method could be used
to track the resonance frequency of the ICPT.
C. Tracking Error Analysis in Loaded Model
A more practical scenario involves taking the secondary load
into consideration, as shown in Fig. 4(a). In this case, the
resistance load of the receiver is considered and the receiver
loop can be regarded as the reflected impedance Z
REF
in the
resonance loop, as shown in Fig. 4(b). Both movement between
the ferrite components and a change in the load would change
the resonance frequency under these circumstances.
The resonance frequency can be determined using the loop
impedance,
loop TX REF
Z Z Z
, (13)
which is the sum of the transmitter impedance Z
TX
and the
reflected impedance of the receiver, Z
REF
, where
下载后可阅读完整内容,剩余12页未读,立即下载

weixin_38523251
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开








最新资源
- 《实用UNIX教程》:免密码资源,专供内部学习
- Lemon BLOG v1.0 - 简洁大方的源代码下载
- Openfire 3.9与2.1版本必备jar包列表
- VC++课程设计:第四章深入多文档处理程序开发
- 探索Wyn Enterprise动画数字的应用与实践
- 蓝天780M清凉版BIOS:官方频率下的温度优化解决方案
- SPSS数据挖掘在电信行业的深入应用与实践
- 情人节许愿树源代码下载 - 漂族祁愿常青树
- 实现节点自由拖拽的VC++ DragTreeControl树形控件教程
- Rufus 3.1新版本发布:便捷的镜像写入优盘工具
- 以太坊图调试器:以图形化方式全面了解智能合约执行
- Wyn Enterprise自定义地图功能深入解析
- FPGA工程师十年心路历程:从入门到精通
- 在PeerSim平台实现OceanStore路由协议仿真的教程
- 探索OpenGL实现的太空射击游戏源代码
- Windows系统音频服务故障解决指南






















