TwinCAT NC PTP 运动控制深度解析
"TwinCAT NC PTP 运动控制详解V14"
TwinCAT NC PTP (Point-to-Point) 运动控制是Beckhoff自动化系统中的一个重要组成部分,用于实现精确、高速的机械运动控制。TwinCAT是Beckhoff的集成自动化软件,它结合了PLC(可编程逻辑控制器)功能和NC(数字控制)功能,为工业自动化提供了全面的解决方案。
在TwinCAT NC PTP系统中,PTP运动控制是指控制器按照预设路径,将机器轴从一个点快速、准确地移动到另一个点。这种技术广泛应用于各种精密定位任务,如机器人、半导体制造设备和包装机械等。
**1. TwinCAT NC PTP与TwinCAT PLC的关系**
TwinCAT NC PTP与TwinCAT PLC紧密配合,PLC负责处理系统的逻辑控制,而NC PTP则专注于高精度的运动控制。两者通过ADS(Automation Device Specification)通信协议交互,确保数据交换的实时性和准确性。
**1.2 控制的轴的类型和数量**
TwinCAT NC PTP可以控制多种类型的轴,包括电机轴、线性轴和旋转轴等。系统支持多个轴的同时控制,能够实现复杂的多轴同步运动。
**1.3 控制周期**
控制周期决定了NC PTP系统的响应速度。TwinCAT NC PTP具有极短的控制周期,通常在微秒级别,以满足高动态性能的要求。
**1.4 配置、编程和调试**
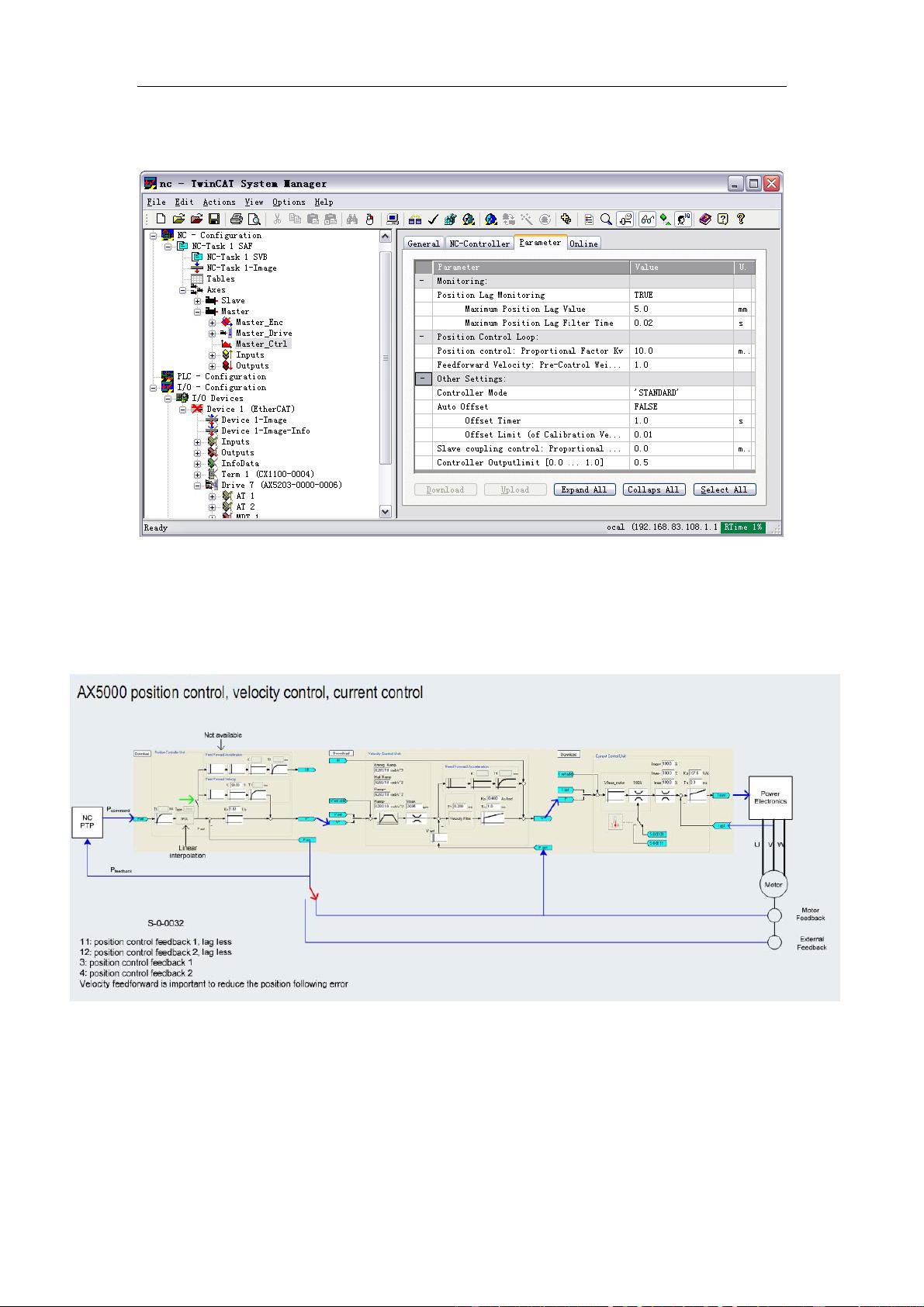
配置阶段,开发者需要在TwinCAT环境中设置轴参数,如编码器、驱动器和控制参数。编程时,可以使用TwinCAT的专用语言编写NC程序,定义轴的运动轨迹。调试阶段,使用轴调试界面检查和优化轴的行为,包括静态和动态性能。
**2. TwinCAT NC轴的配置**
- 添加轴:在项目中添加新的轴,并指定其类型。
- 参数设置:包括编码器的分辨率、驱动器的参数、控制参数等。
- ADS信息:NC轴的参数可以通过ADS接口读取和设置。
- 对应PLC:NC轴的动作与PLC程序协同工作,实现逻辑控制与运动控制的融合。
- 导出与导入:方便轴配置的备份和迁移。
- 虚拟编码器轴和时间轴:用于模拟或时间同步的控制需求。
**3. NC轴的调试**
- Axis调试界面提供了丰富的子选项,如一般设置、参数、动态性能等,用于细致调整轴的运行状态。
- 使能和点动:允许在安全条件下启动和移动轴。
- 功能测试和动态性能调试:评估轴的加速度、速度和定位精度。
- 齿轮联动和凸轮联动:实现轴之间的复杂机械运动关系。
- 位置补偿:修正由于机械误差导致的位置偏差。
- 其他联动方式:适应不同应用场景的特殊联动需求。
TwinCAT NC PTP提供了强大而灵活的运动控制功能,通过详细的配置和调试,可以实现高精度、高性能的自动化设备控制。理解并熟练掌握这一技术,对于提升自动化设备的性能和效率至关重要。
TwinCAT NC PTP 运动控制详解 V14.doc
第 15 页 共 115 页 2010-6-28
本文纯属个人经验,非 Beckhoff 公司正式发行,如有疑问,请直接联系作者。
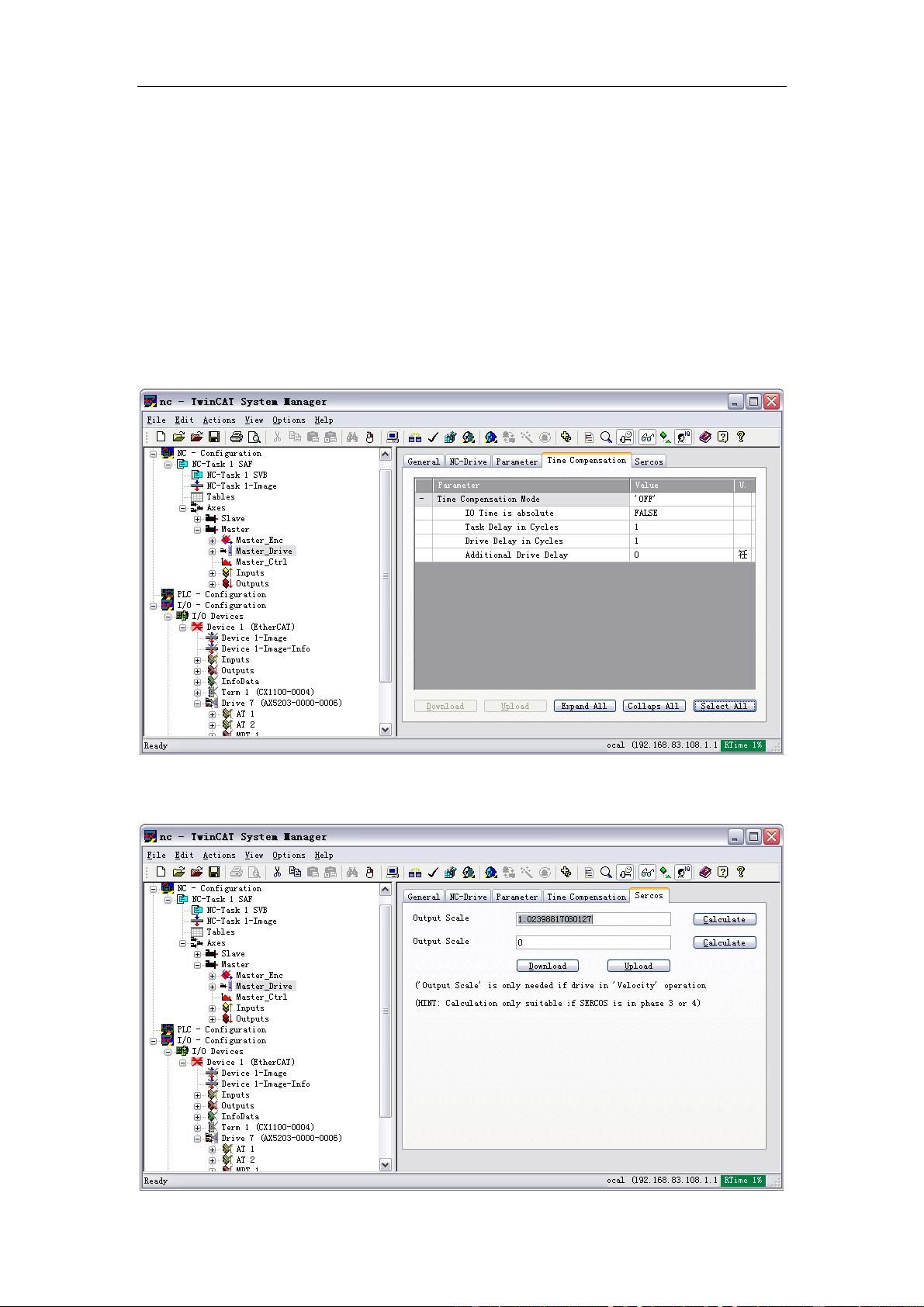
(计算过程和原理待确认,不常用)
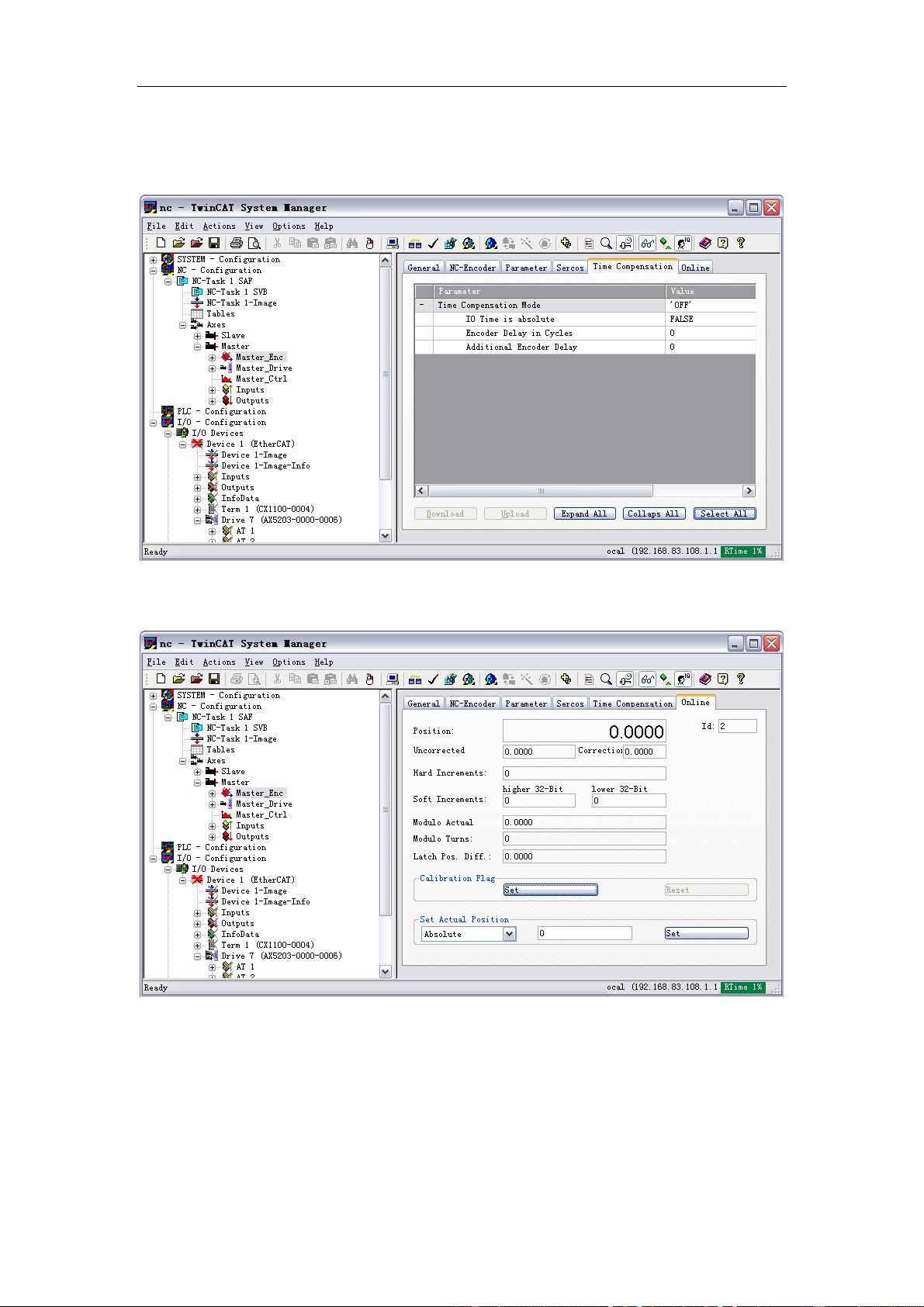
z Time Compensation
(参数说明待确认,不常用。)
z Online
此页显示当前位置,转动圈数等信息。其设置位置,显示位置等功能都可以在 AXIS 的 Online
页面实现。所以这个页面很少使用。
这个页面可以设置寻参标记,如果机械部分不具备调试条件,而要调试电气部分的话,可以
使用这个功能。
剩余116页未读,继续阅读
2020-04-29 上传
2019-07-31 上传
点击了解资源详情
点击了解资源详情
2022-07-15 上传
2012-02-16 上传

qq_14962395
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
