单级移动倒立摆建模与MATLAB仿真课程设计
版权申诉
180 浏览量
更新于2024-08-23
收藏 293KB PDF 举报
自动化课程设计涉及的是单级移动倒立摆的建模与控制理论实践。该课程设计主要针对的是非线性控制系统中的经典案例,目标是让学生深入理解并掌握控制系统的数学建模、稳定性分析以及Matlab在控制系统仿真中的应用。
首先,学生需要研究单级倒立摆的非线性数学模型,这是一种典型的问题,因为它具有非线性特性、强耦合、多变量和不稳定的特点。该部分任务要求建立该装置的动态模型,通常以控制输入(u,例如小车的移动)作为输入信号,而摆杆的运动状态作为输出信号()。这涉及到系统动力学的分析,可能需要考虑质量、惯性、重力等因素的影响。
其次,线性化方法在此至关重要,通过对非线性模型进行适当的处理,将复杂系统简化为近似的线性模型,以便进行后续的分析和设计。线性模型的形式通常是传递函数,它能够直观地表示输入与输出之间的关系,这对于控制器设计和系统性能评估十分关键。
接着,课程设计要求学生利用Matlab进行系统稳定性分析。通过画根轨迹图,可以直观地了解系统稳定的区域,而BODE图则能计算出系统的相角裕度和截止频率,这两个参数对于评估闭环系统的性能和设计合适的控制器有着重要意义。
此外,学生还需要模拟系统的阶跃响应,这是评估控制器实际效果的重要手段,通过观察阶跃响应曲线,可以判断系统的响应速度、超调量和稳态误差等性能指标。
整个设计过程不仅锻炼了学生的数学建模能力,还提升了他们使用Matlab进行仿真和分析的技能,以及对控制系统稳定性的理解和控制策略的实施能力。课程设计的时间表也清晰地规划了每个阶段的任务,确保学生能在规定时间内完成各项任务,包括编写详细的课程设计报告。
通过这个项目,学生将深刻理解到非线性控制系统的设计流程和实际应用,为今后在自动化领域进行更复杂工程项目的控制设计打下坚实的基础。
免责声明:文档在线网中所有的文档资料均由文档在线网会员提供 ,该文档资料的版权属于提供者所有。文档在线网会对会
员提供的文档资料进行筛选和编辑,但是并不声明或保证其内容的合法性和正确性。
课程设计任务书
学生姓名: 专业班级:
指导教师: 工作单位:
题 目: 单级移动倒立摆建模及串连滞后校正
初始条件:
要求完成的主要任务 :
(包括课程设计工作量及其技术要求, 以及说明书撰写等具体要求)
1、
研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的
线性数学模型-传递函数(以 u 为输入, 为输出);
2、
用 Matlab 对系统进行稳定性分析 , 并求其阶跃响应 .
时间安排:
1.15 ~16 明确设计任务,建立非线性模型
1.17 ~19 线性化,设计校正装置
1.23 ~24 仿真分析,撰写课程设计报告
指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日
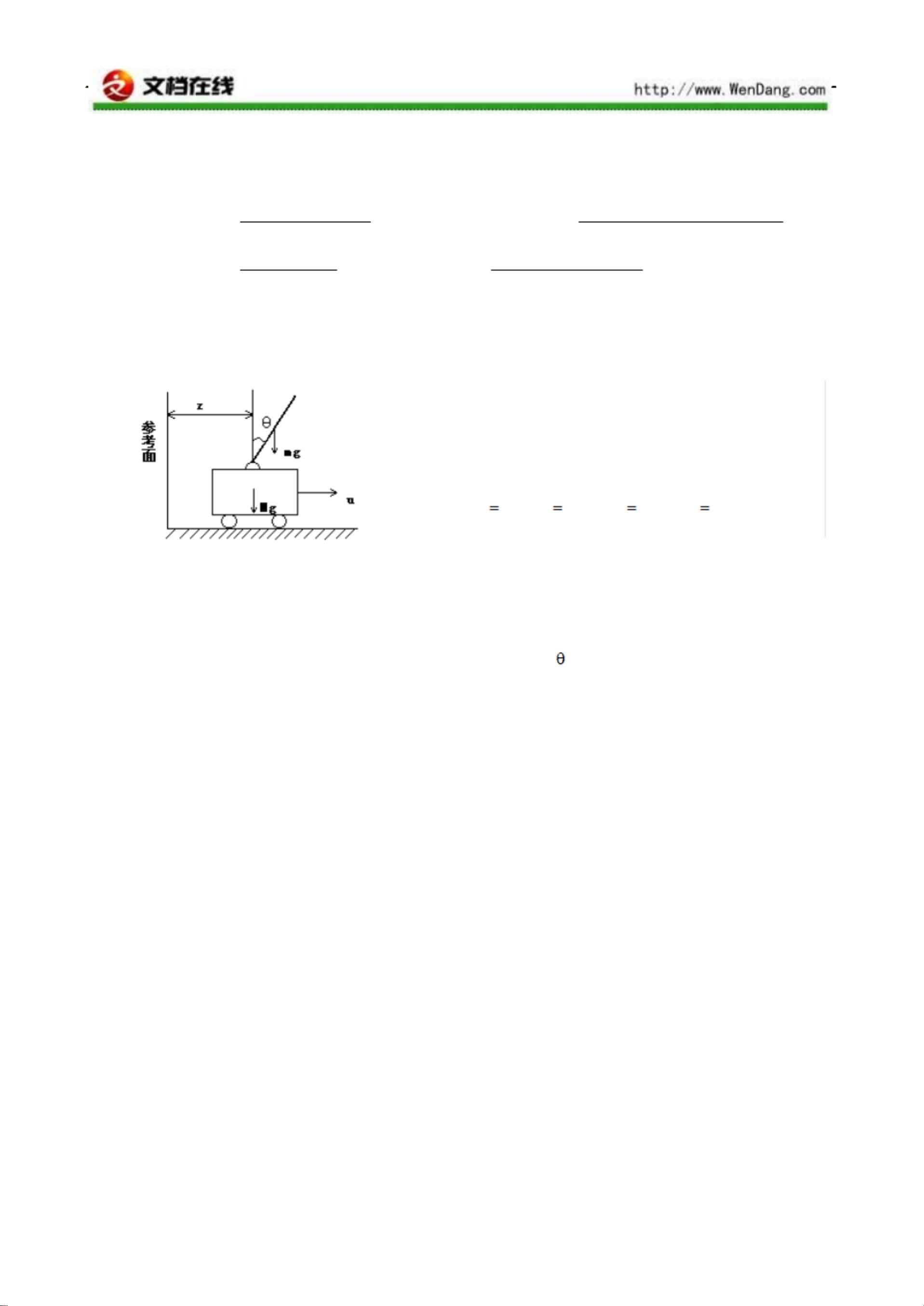
图示为一个倒立摆装置,该装置包含一个小
车和一个安装在小车上的倒立摆杆。由于小
车在水平方向可适当移动,因此,控制小车
的移动可使摆杆维持直立不倒。
2
1 , 0.2 , 0.5 , 10 /M kg m kg l m g m s
下载后可阅读完整内容,剩余9页未读,立即下载
188 浏览量
2021-11-17 上传
2021-09-29 上传
305 浏览量
2024-11-02 上传
268 浏览量
169 浏览量
276 浏览量
292 浏览量

qinqin1995
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
