机器人坐标转换与数学基础
需积分: 50 61 浏览量
更新于2024-07-19
1
收藏 2.18MB PDF 举报
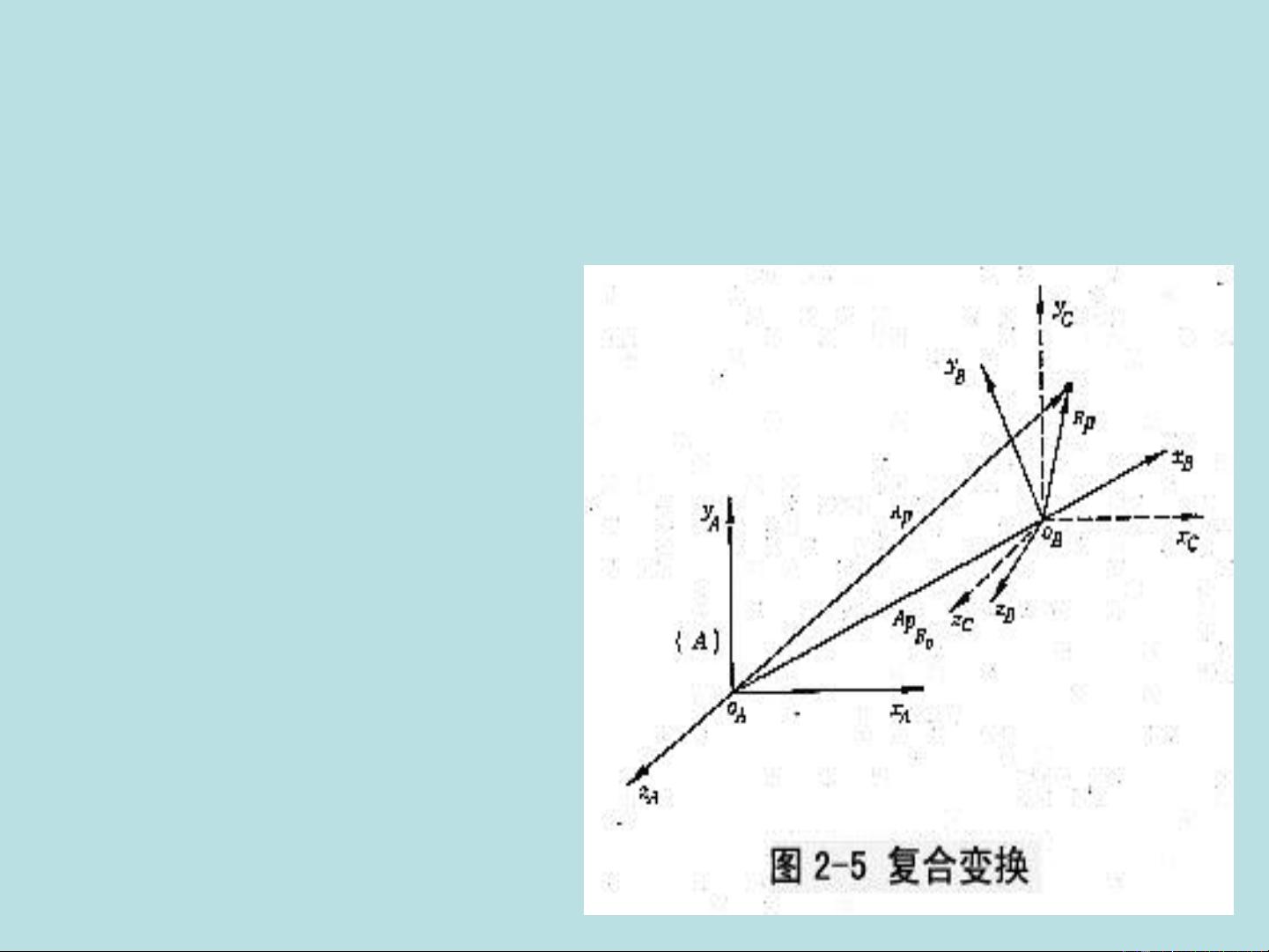
"机器人坐标转换涉及数学基础知识,包括位置和姿态的表示、坐标变换、齐次坐标变换、物体的变换及逆变换、通用旋转变换等。这些概念是机器人技术中的核心部分,用于描述和控制机器人的运动。"
在机器人技术中,坐标转换是至关重要的,它涉及到机器人如何在不同坐标系之间定位自身和周围环境。位置和姿态是描述机器人状态的基本要素。
1. 位置描述:在直角坐标系A中,一个点P的位置可以用一个3x1的列向量表示,即位置矢量P。这个矢量指明了点P相对于坐标原点的距离和方向。
2. 方位描述:空间物体B的方位(Orientation)可通过固接于物体B的坐标系B的三个单位主矢量[xB, yB, zB]相对于参考坐标系A的方向余弦来描述。这形成了一个3x3的旋转矩阵,称为B到A的转置矩阵TB。旋转矩阵是正交的,意味着它的逆矩阵等于其转置。
3. 旋转矩阵:绕x, y, z三轴的旋转分别有对应的旋转矩阵,它们都是由对应的正弦和余弦值构成。例如,绕Z轴的旋转矩阵Rz(θ)由cosθ, -sinθ, 0, sinθ, cosθ, 0, 0, 0, 1组成。通过这些矩阵,可以将一个坐标系下的点转换到另一个坐标系下。
4. 齐次坐标变换:在机器人学中,齐次坐标被广泛使用,因为它能同时表示位置和姿态。一个4x4的齐次变换矩阵可以组合旋转和平移,简化了坐标变换的过程。
5. 物体的变换及逆变换:物体的变换通常涉及其位置和姿态的变化,这可以通过应用相应的旋转和平移矩阵实现。逆变换则用于从一个坐标系到另一个坐标系的反向转换。
6. 通用旋转变换:除了特定轴的旋转,还可以通过组合多个旋转矩阵实现任意角度的旋转。这些变换可以用来描述复杂的关节运动或物体的任意旋转。
了解这些基础知识对于理解和设计机器人的运动控制算法至关重要,包括路径规划、避障和精确定位等任务。在实际应用中,机器人控制系统会依据这些理论进行坐标转换,确保机器人能够准确地执行预定的动作。

214 浏览量
275 浏览量
239 浏览量
269 浏览量
点击了解资源详情

拉普拉斯2017
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
