"Rasa对话机器人调试项目实战:保险行业全程解密"
需积分: 9 75 浏览量
更新于2024-02-02
收藏 3.78MB PDF 举报
本文是关于Rasa对话机器人在保险行业调试过程中的实战解密。在上一篇博客中,我们讨论了日志中显示的当前插槽值的信息,这些值都是空值的状态。日志中还提到了ExecutionContext和state的重要性。
ExecutionContext是执行一个图形组件时所依赖的上下文,没有上下文,就无法确定依赖关系以及获取所需资源。在保险行业调试中,保持正确的上下文非常重要。
日志中的state展示了两个状态。第一个状态是用户意图(update_member_info)和上一个动作(action_listen)的信息。第二个状态是用户意图(update_member_info)和上一个动作(utter_acknowledge_update_info)的信息。
调试过程中,我们注意到日志中的targets字段包含了'select_prediction'。这意味着我们应该关注选择预测这个动作。了解目标动作可以帮助我们更好地理解机器人的行为。
在接下来的调试过程中,我们发现了一些问题。首先,我们注意到在第一个状态中,当前插槽值为空。这可能意味着在对话流程中的某个环节出现了错误或缺失。
接着,我们研究了依赖的图形组件。我们发现了一个graph component,它需要一个上下文来执行。在Rasa对话机器人中,正确处理上下文是非常关键的。
我们还注意到第二个状态中,用户意图和上一个动作之间的转变。这表明在用户更新会员信息后,机器人会作出相应的回应。这能够增强用户体验并提供更好的服务。
综上所述,本文介绍了Rasa对话机器人在保险行业调试中的实战解密。通过分析日志和理解上下文的重要性,我们可以更好地调试和优化机器人的行为,提供更好的用户体验和服务。关注目标动作,并解决插槽值为空的问题,是保证机器人正常工作的关键。我们还了解了图形组件的依赖关系,以及用户意图和动作之间的转变。希望本文对于Rasa对话机器人的开发和调试有所帮助。

这个时候正常的。然后我们来看一下它的 state 的信息, address_city 是 cupertino,然后
address_state 是 CA,这里面有 look up table 相关的内容. 上节课都跟大家谈过.
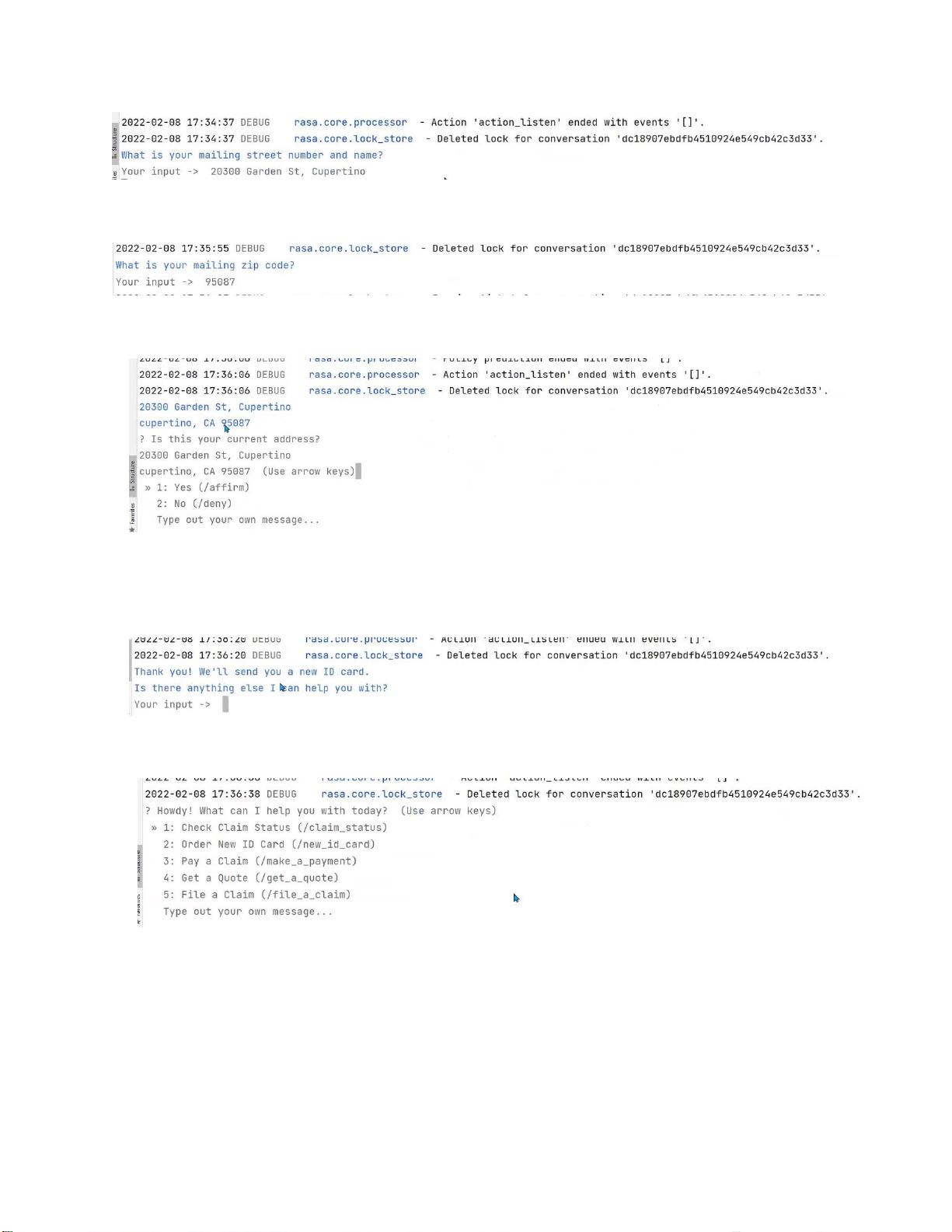
Bot 提示:what is your mailing street number and name,美国的邮寄地址很重要,尤其是
邮编 ,如果你在美国生活过,支付信用卡等之类的这些内容,基本上每次都需要输入这个邮编。
现在住的地方写一个地址:

剩余55页未读,继续阅读
138 浏览量
138 浏览量
115 浏览量
148 浏览量
177 浏览量
173 浏览量
137 浏览量
142 浏览量
193 浏览量

段智华
- 粉丝: 7823
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实战部署UC平台(OCS=VOIP GW=Exchange2007).pdf
- thinking in java
- 嵌入式Linux Framebuffer 驱动开发.pdf
- grails入门指南
- Apress.Pro.OGRE.3D.Programming.pdf
- Linux设备驱动开发详解讲座.pdf
- GoF+23种设计模式
- Wrox.Python.Create.Modify.Reuse.Jul.2008
- sd卡spi模式翻译资料
- 最新计算机考研专业课程大纲
- oracleproc编程
- Google-Guice-Agile-Lightweight-Dependency-Injection-Framework-Firstpress
- oracle工具TOAD快速入门
- Unix 操作命令大全
- ARM映象文件及执行机理
- rhce教材RH033 - Red Hat Linux Essentials
