




贝叶斯稀疏模型选择在统计形状模型中的应用
下载需积分: 10 | PDF格式 | 2.7MB |
更新于2024-07-17
| 66 浏览量 | 举报
"这篇文章主要探讨了在统计形状模型中采用贝叶斯方法进行稀疏模型选择的问题。在创建统计形状模型(SSMs)时,群体注册是基础步骤,特别是当不同个体的点集数量变化时。每个点集通常被视为经过空间变换的高斯混合模型(GMM)样本。因此,混合模型中的每个高斯分布对应一个地标或模型点,与训练点概率对应。
在实际应用中,高斯分量、变换以及概率匹配通常通过期望最大化(EM)算法计算。为了防止过拟合和欠拟合,SSM需要通过调整所需的组件数量来优化。然而,手动设置组件数量在实际操作中存在困难,可能会导致模型不准确。
本文提出了一种不同的方法,即从最大模型出发,然后通过贝叶斯策略删除那些在统计上可忽略的组件,以此自动进行模型简化。这种方法考虑了不确定性,并根据数据的证据逐步减少模型复杂性,从而更准确地捕捉形状变化的模式。贝叶斯方法的优势在于它能够量化不确定性,并且在模型选择过程中引入了先验知识,这有助于找到最佳的模型复杂度。
文章详细阐述了如何构建贝叶斯框架来实现这一目标,包括如何定义先验分布,如何更新后验概率,以及如何确定何时删除模型组件。此外,作者还可能讨论了该方法在实际应用中的效果,比如在医学图像分析、生物力学研究或其他需要形状建模的领域。
通过这种方式,该文为解决统计形状模型的稀疏选择问题提供了一个新颖而有力的工具,不仅提高了模型的准确性,还减少了人为干预的需求,对于理解和改进形状建模方法具有重要意义。"
BAYESIAN MODEL SELECTION IN SSMs 863
(a) (b)
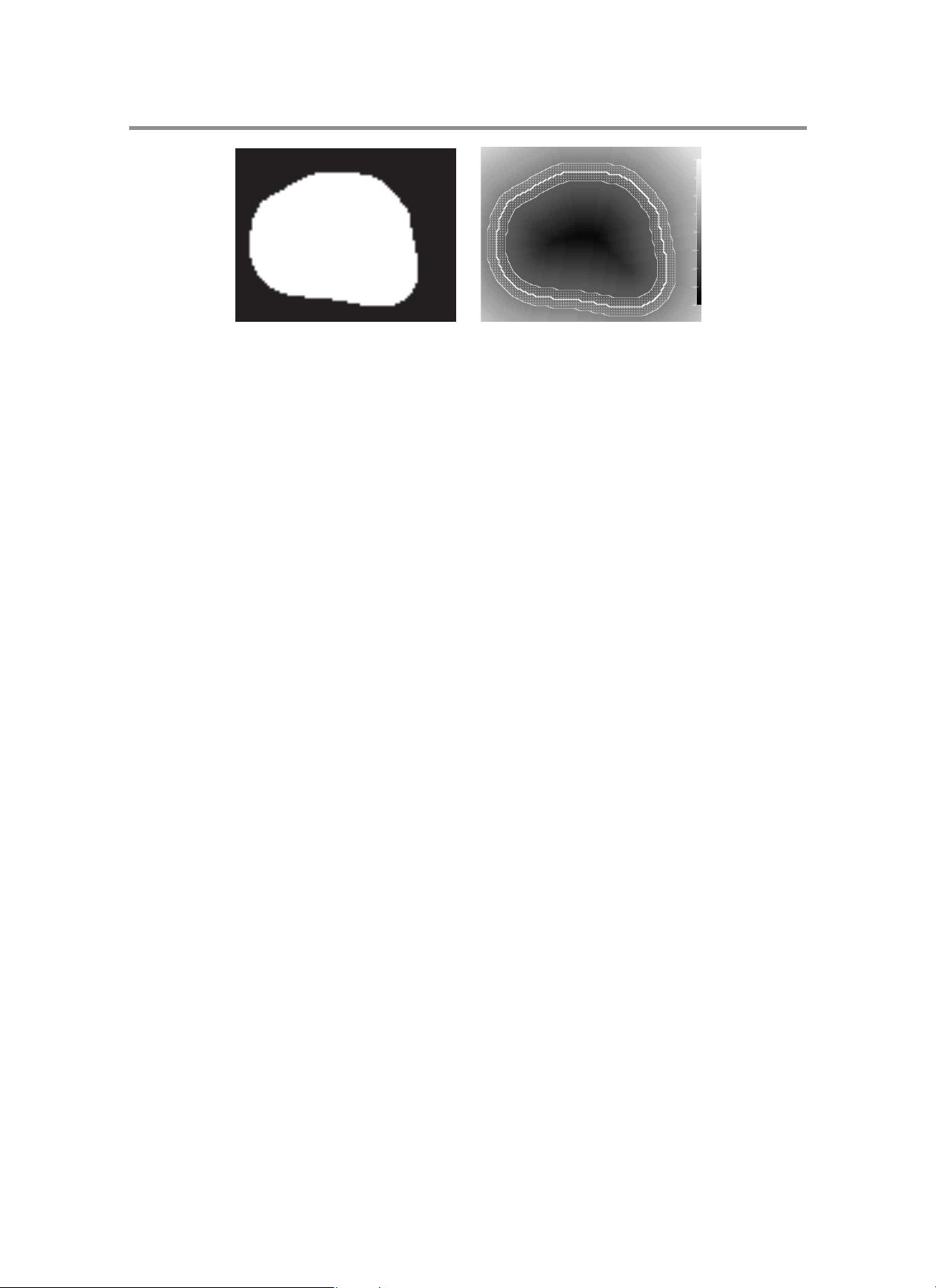
Figure 1. Shape representation using the explained hybrid point sets: (a) Binary representation of a shape
in the training set. (b) Corresponding SDF, with overlaid narrow band (shading) and zero level set contour
(thick line). The shape is represented as a set of the points in the narrow band, where each point is defined by
concatenating its spatial coordinates and SDF value (i.e., ˜x =[x
T
,φ(x)]
T
). The latter can aid in reconstructing
the shape with the correct orientation and topology.
goals, we construct the SSM in section 2.6 by determining the virtual point correspondences
[30] and applying the PCA.
2.1. Shape representation. The input data to our algorithm consists of K binary masks,
as D dimensional images, from which we constitute our training point sets. To this end, it
is customary to sample the points from the surface of the binary masks and thus ignore the
orientation of the surfaces (or the polarity of the masks). Without this information, recon-
struction of surfaces from points can be handled through various approaches. For instance,
Zhao, Osher, and Fedkiw [58] first computed an unsigned distance map from the points by
solving the Eikonal equation; then a geodesic active contour was driven toward the point set
using advection on the distance map. This step is time-consuming and, during its evolution,
contour can be trapped in a local minima. In other related works, the direction of normal
vectors to the surface is estimated and inconsistent normal vectors are flipped [29]. Then an
SDF is constructed by moving along the normals in both directions of the surface [9]. Without
explicit information on the surface normal, its automated extraction from geometry alone is
a nontrivial and ambiguous process for complex and closed structures.
Here, we take a different approach and include additional distance features on a surface’s
narrow band for unambiguous surface reconstruction. As shown in Figure 1, given a binary
mask we first construct an SDF, whose zero level set represents the surface of the mask.
Next, we collect all the points within a narrow band of thickness δ around the zero level
set. Each point is defined as an augmented D + 1 dimensional vector and consists of spatial
coordinates and the corresponding SDF value. Distance information is conveyed through our
EM algorithm to the constructed statistical model and can be used to infer the implied surface
from the mean model. To reconstruct a surface, we first interpolate the values of the SDF on
a regular grid of voxels and then extract the zero level set (see (3.2)).
2.2. Sparsity and alignment through EM algorithm. Let X = {X
k
},1≤ k ≤ K,denote
the set of K observed (D + 1) dimensional training point sets defined as X
k
= {˜x
ki
∈ R
D+1
|
1 ≤ i ≤ N
k
}.Letφ
k
denote the SDF from the surface of the kth segmented training shape.
下载后可阅读完整内容,剩余29页未读,立即下载
相关推荐





MengHaiYunTian
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- XCP协议族标准文档介绍与核心规范解析
- Maya-sniffer:高效可视化管理Maya场景文件
- 深入解析JsonExt压缩包文件及其应用
- SpringMVC项目必备的jar包清单
- 深入探讨Delphi7中的ImageButton控件
- J2EE教程中文版:深入学习企业级Java应用开发
- EditASM:高效的单片机汇编语言编辑器
- ESP8226继电器固件实现局域网网页远程控制
- RDH2159 PCI转串并口驱动安装及兼容性
- 安卓五子棋游戏开发及源码解析
- NTRViewer: PC端流媒体查看器的NTR CFW支持
- 徕卡全站仪数据转换采集解决方案
- 初学者必玩:XNA平台下的赛车游戏RunCar
- MATLAB实现三维装箱问题的近似算法
- .NET实现TGA文件循环播放技术探讨
- KIO-Cloud: 统一云存储服务的创新解决方案






















