Buck-Boost变换器无源滑模控制技术研究
需积分: 17 178 浏览量
更新于2024-08-11
1
收藏 264KB PDF 举报
"Buck-Boost变换器的无源滑模控制研究 (2013年)"
本文主要探讨了Buck-Boost变换器在无源性控制基础上结合滑模控制技术,以解决电压与电流过冲问题。Buck-Boost变换器是一种DC-DC开关变换器,具备升压和降压功能,广泛应用于电源转换和功率因数校正电路。由于其非线性的特性,非线性控制方法对其性能优化显得尤为重要。
无源性控制是一种基于能量的控制策略,它通过调整系统的无功分量来实现能量的稳定跟踪,从而保证系统的全局稳定性。这种方法对系统参数变化和外部扰动具有良好的鲁棒性。然而,在实际应用中,无源性控制可能会导致电压和电流的过冲现象。
滑模控制,又称变结构控制,是针对非线性系统的有效控制手段。它通过设计一个控制律,使系统状态在有限时间内趋近于一个滑动模态,从而实现对非线性系统行为的快速和鲁棒控制。在Buck-Boost变换器中,由于其工作模式在开关状态间的切换,滑模控制能直接作用于变换器的动态行为,不需进行系统的线性化处理。
在本文的研究中,首先建立了Buck-Boost变换器的欧拉-拉格朗日(E-L)模型,揭示了其无源性控制的内在规律。然后,结合滑模控制理论,设计了一种无源滑模控制器。通过Matlab环境下的动态仿真验证了该控制策略的有效性。仿真结果表明,无源滑模控制不仅能显著抑制电源和负载扰动引起的电压电流过冲,还具有快速的动态响应特性,增强了系统的鲁棒性。
将无源性控制与滑模控制相结合,为Buck-Boost变换器提供了一种更优的控制策略,解决了传统无源性控制的不足,提高了变换器在实际应用中的性能。这种控制方法对于开关电源和电力电子领域的研究具有重要的理论价值和实践意义。
第
2
期
2013
年
3
月
阳区
B
咆吁咱
vd
nr nr
u
学时
W
O
P
21
源
M
a
m
u
o
冒
-d
电
No.2
Mar.2013
Buck-Boost
变换器的无源滑模控制研究
屈鲁
(上海空间电源研究所,上海
200245)
摘要:为解决无源性控制时
Buck-Boost
变换器电压与电流过冲的问题,在无源性控制的基础上加入滑模控制。
通过建立
Buck-Boost
变换器的欧拉-拉格朗日(E
-L)
模型,可以得到
Buck-Boost
变换器的无源性控制规律。在此基
础上,结合滑模控制原理,设计
Buck-Boost
变换器的无源滑模控制器。在
Matlab
环境下,进行
Buck-Boost
变换器无
源滑模控制的动态仿真。仿真结果表明,
Buck-Boost
变换器的无源滑模控制对电源扰动、负载扰动具有很强的鲁棒
性,且动态响应速度快,能够解决无源性控制电压与电流过冲的问题。
关键词
:Buck-Boost
变换器;无源滑模控制;动态仿真
中图分类号:
TM463;
TP2
9
文献标志码
:A
文章编号
:2095-2805(2013)02-0105-05
引言
Buck-Boost
变换器属于
DC-DC
开关变换器,
是典型的非线性开关系统广泛应用于开关电源和
功率因数校正
(PF
C)电路。相对于其他的
PWM
电力
变换器,
Buck-Boost
变换器的最大优点在于可实现
直流电压的升、降变换。由于
Buck-Boost
变换器本
质上是一个非线性系统,所以对其进行非线性控制
十分适合。
无源性控制是基于能量的非线性系统控制和
稳定性分析的重要方法,是通过配置系统能量耗散
方程中的无功分量,使系统总能量跟踪预期的能量
函数,从而使系统渐进稳定。该方法是对闭环系统全
局稳定的控制策略,对系统参数变换和外来扰动具
有较强的鲁棒性,是一种本质上的非线性控制[月。
滑模控制也称变结构控制,是一种常用的非线
性控制方法,在理论上可以应用于所有的非线性系
统。由于变换器的整个工作过程是在开关量控制下
两个子拓扑间的切换,具有变结构的特点,因此可
以在不需要任何简化和近似的情况下直接运用滑
模控制。国内外大量文献中也提及了滑模控制在开
关变换器中的应用,其优点是使得开关变换器的动
收稿日期
:2012-12-23
作者简介:屈鲁
(1987-)
,男,硕士,主要研究方向为空间电源控制器,
Tel: 18701853243; E-mail:
pipilu1987@hotmai
l.
com
。
态响应速度加快,且对于电路参数的扰动及外界的
干扰具有强鲁棒性
[2.3]
。
Buck-Boost
变换器无源性控制对电源扰动和
负载具有较强的鲁棒性,但是在动态变化时电压和
电流存在过冲,考虑到滑模控制能够加快开关变换
器的动态响应速度,所以在无源控制的基础上加入
滑模控制以解决电压和电流过冲的问题。
1
Buck-Boost
变换器的无源控制
1.
1
Buck-Boost
变换器的
E-L
模型
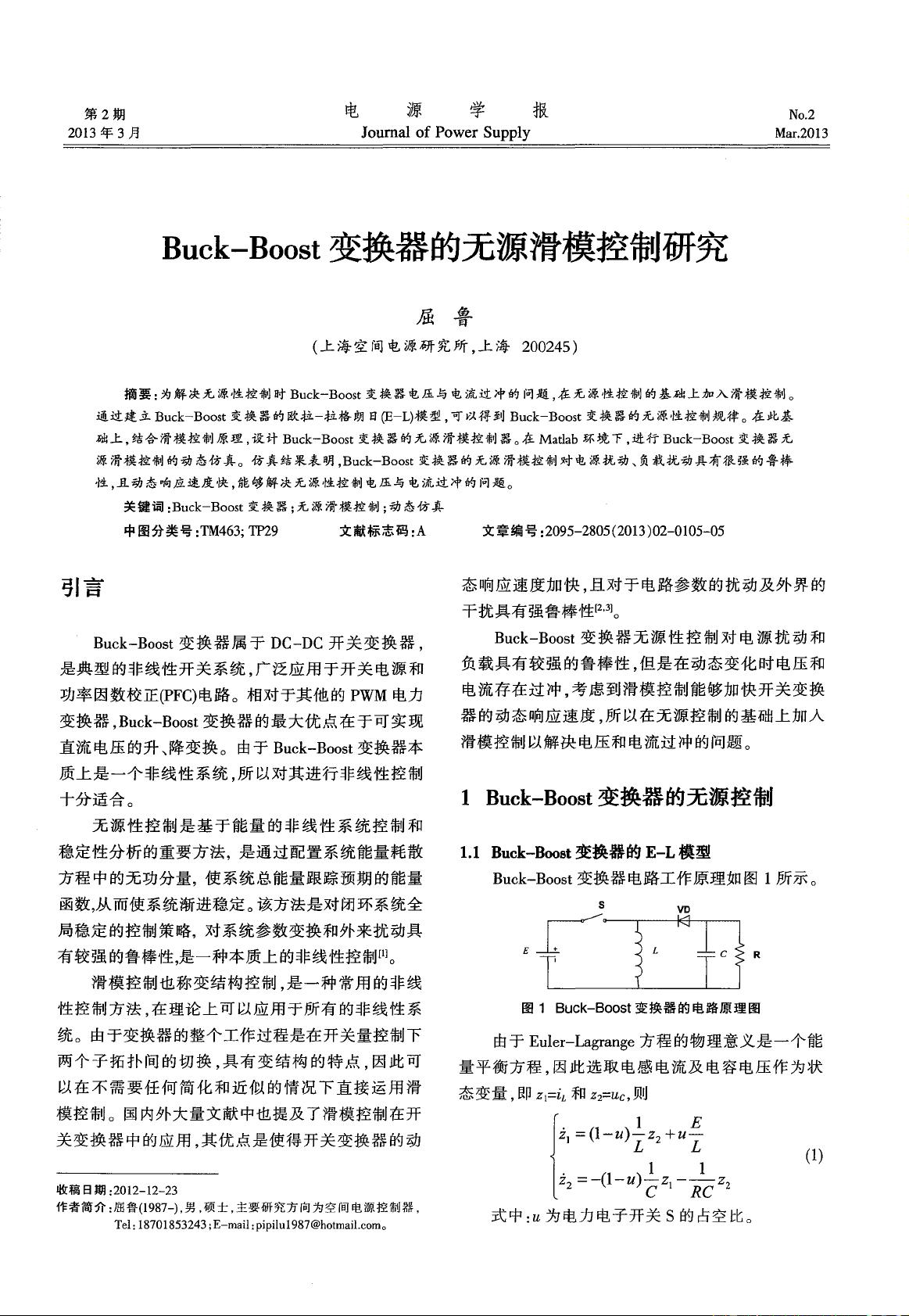
Buck-Boost
变换器电路工作原理如图
1
所示。
E
工----0""""气
]]
图
理
原
路
电
的
器
L
换
E
〈〈
74
变
cu
nu
O
RU
LK
FU
U
RM
图
由于
Euler
一
Lagrange
方程的物理意义是一个能
量平衡方程,因此选取电感电流及电容电压作为状
态变量,即
Zl=h
和
Z2=UC
,
则
llE
Z]
=
(1-
u)
: Z2 + u -:
. L
~
L
(1)
1 1
ι=
一(1一的一
Z]
一
-z2
'C'
RC
式中
:U
为电力电子开关
S
的占空比。
下载后可阅读完整内容,剩余4页未读,立即下载
862 浏览量
831 浏览量
2044 浏览量
2022-12-15 上传
545 浏览量
2021-09-17 上传
点击了解资源详情
点击了解资源详情
2025-03-06 上传

weixin_38531210
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
