高阶谱不变量在形状识别中的应用
需积分: 9 192 浏览量
更新于2024-08-01
收藏 630KB PDF 举报
"该文探讨了一种基于高阶谱(Higher-order Spectra, HOS)不变量的形状识别方法,利用拉东变换(Radon Transform)和双谱分析(Bispectral Analysis)来生成旋转、平移和缩放(Rotation, Translation, Scaling, RTS)不变的特征。为了提高这些不变量的抗噪能力,文中引入了集合平均技术来估计双谱。通过阈值化和主成分分析进一步减少特征数据,结果表明生成的特征不变量在分类阶段比原始特征更可靠且更具判别性。实验显示,提取出的高阶谱不变量对于形状识别具有很好的性能,形成紧凑的表示,适用于纹理和形状的识别任务。"
本文是关于计算机视觉和图像处理领域的研究,具体关注的是形状识别问题。形状识别是计算机视觉中的一个关键问题,它涉及从图像中识别和区分不同物体或对象的形状。高阶谱(HOS)分析是信号处理领域的一个工具,它提供了对信号结构更深入的理解,特别是在分析非线性和非高斯信号时特别有用。
文章首先介绍了如何构建旋转、平移和缩放不变的特征。这通常是一个挑战,因为物体在实际环境中的位置和大小变化可能会影响其在图像中的表现。拉东变换是一种数学工具,它可以将图像投影到不同的直线方向上,从而得到与物体旋转无关的特征。结合双谱分析,可以捕获图像的频域信息,进一步提供形状的细节。
为了增强这些不变量对噪声的鲁棒性,作者引入了集合平均技术。这是一种统计方法,通过计算多个独立估计的平均值来减小噪声的影响,提高估计的精度。这种方法在估计双谱时特别有用,因为它可以帮助过滤掉噪声引起的高频成分。
接下来,为了降低特征维度并保持关键信息,文章应用了阈值化和主成分分析(PCA)。阈值化可以消除不重要的小特征,而PCA则可以将高维数据投影到低维空间,保留最重要的信息,同时减少计算复杂度。
最后,实验部分展示了提取的高阶谱不变量在分类任务中的优势。这些不变量不仅在识别率上表现出色,而且形成的特征向量更加紧凑,有利于后续的机器学习算法,如支持向量机或神经网络,进行高效且准确的分类。
这篇论文为形状识别提供了一个创新的方法,结合了拉东变换、双谱分析、集合平均和降维技术,提高了在复杂环境下的识别性能。这些技术的应用对于改进现有的图像识别系统,尤其是在纹理和形状识别方面,具有重要的理论和实践价值。
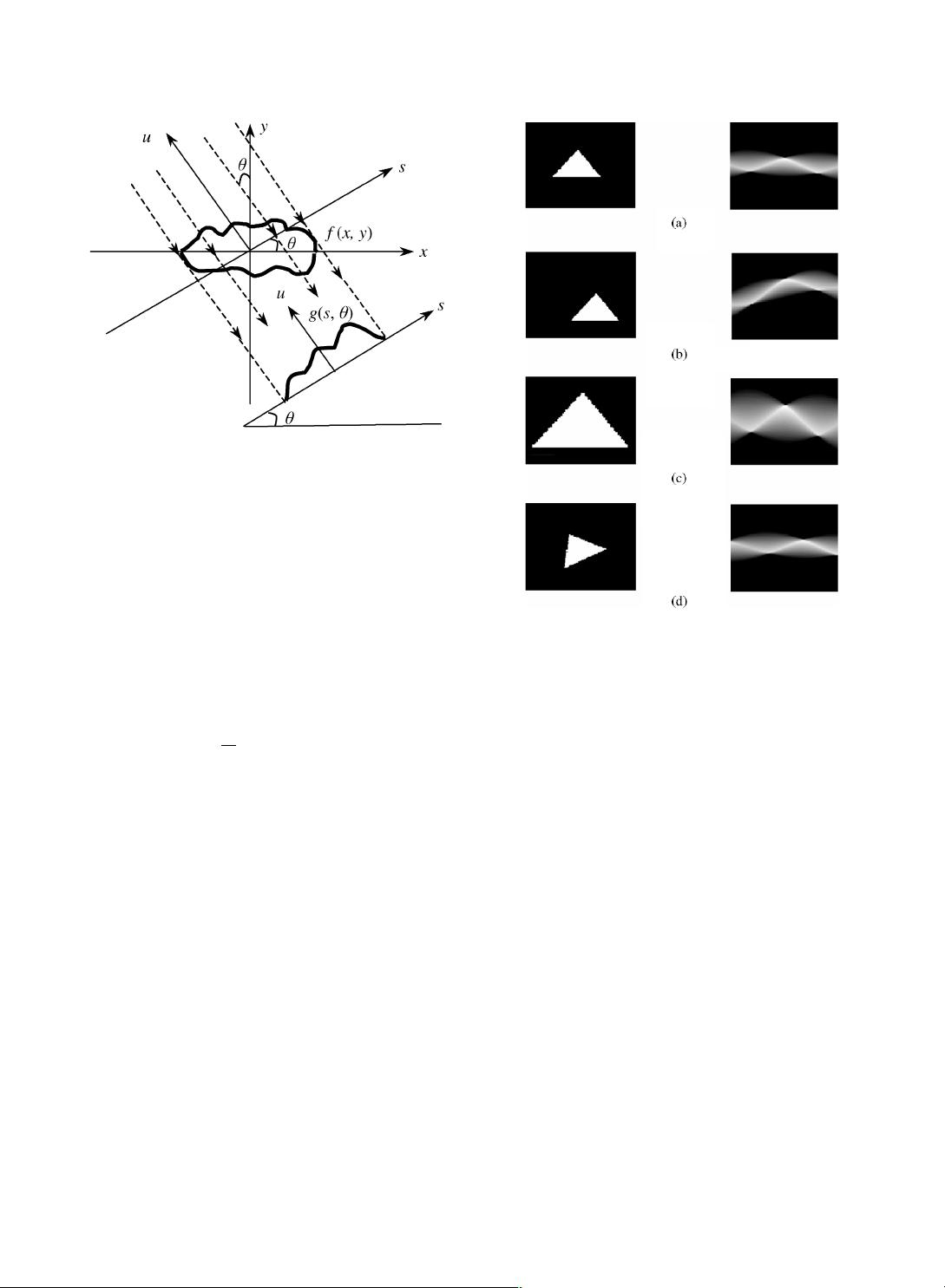
Fig. 1. The Radon transform g(s, ) is the 1-D projection of
f (x, y) at an angle .
Fig. 2. The Radon transform of a triangle shape (a) and the
Radon transforms of its translated (b), scaled (c), and rotated (d)
versions.
where s"x cos #y sin and u"! x sin #y cos
[25]. The Radon transform is linear, space-limited, and
periodic in with the period of 2. It has useful proper-
ties about translation, rotation, and scaling as outlined in
Eqs. (10)}(12).
translation: f (x!x
, y!y
)
0 g(s!x
cos !y
sin , ), (10)
rotation by
: f
N
(r, #
) 0 g(s, #
), (11)
scaling: f (ax, ay) 0
1
a
g(as, ), aO0. (12)
Here, f
N
(r, ) is the polar coordinate representation of
f (x, y) and the symbol `0a denotes the one-to-one trans-
formation relation. As shown in Eqs. (10)}(12), a transla-
tion of f (x, y) results in the shift of g(s, ) by a distance
equal to the projection of the translation vector (x
, y
)
on the line s"x cos #y sin . A rotation of the object
by angle
leads to a translation of its Radon transform
in the variable . A scaling of the (x, y) coordinates of
f (x, y) results in scaling of the s coordinate together with
an amplitude scaling of g(s, ). Fig. 2 shows the examples
of the properties of the Radon transform under di!erent
transformations.
3.1.2. HOS invariants generation scheme
Based on the properties of the Radon transform and
bispectra, we propose the following feature generation
method. For each model image pattern I(x, y), the orig-
inal 2-D data are "rst reduced to a set of 1-D functions
g(s, ) via the Radon transform using Eq. (9). It is as-
sumed that the origin is set at the center of the image
plane. Bispectrum of g(s, ) for each , denoted as
B
F
( f
, f
), is computed using
B
F
( f
, f
)"G
F
( f
)G
F
( f
)G
H
F
( f
#f
), (13)
where G
F
( f ) is the Fourier transform of g(s, ) with s be-
ing a variable and being a parameter. B
F
( f
, f
)is
translation invariant. A rotation of the object in the
image results in the cyclically shifted B
F
( f
, f
) along the
axis . The bispectrum of a scaled version of the original
image maintains the scaling e!ect except an additional
constant coe$cient in the magnitude of B
F
( f
, f
). The
bispectral moment M of order (p, q) of each B
F
( f
, f
)at
a certain angle is de"ned as
M
NO
()"
f
N
f
O
B
F
( f
, f
)df
d f
,
0)f
)f
)f
#f
)1, (14)
where p and q are two nonnegative integers. A set of
feature parameters
NO
() are then de"ned from the
bispectral moments M
NO
()as
NO
()"Imaginary(M
NO
() )/Real(M
NO
() ). (15)
In the following sections, we will prove that the de"ned
feature parameters
NO
() are RTS invariant.
2100 Y. Shao, M. Celenk / Pattern Recognition 34 (2001) 2097}2113
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
209 浏览量
2021-02-20 上传
2021-04-30 上传
2021-06-25 上传
2021-02-06 上传
120 浏览量
2021-02-10 上传

zhangxiaojing101
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







