LSTM神经网络驱动的汽车主动悬架优化控制策略研究
版权申诉
185 浏览量
更新于2024-06-19
收藏 5.12MB PDF 举报
本篇论文深入探讨了基于长短期记忆神经网络(Long Short-Term Memory, LSTM)的汽车主动悬架优化控制方法。随着汽车工业的智能化发展,智能线控底盘的主动悬架系统已经成为关注焦点,因为它们能根据实时路况和车辆状态调整,以提高驾驶舒适性和操控稳定性。传统控制方法的局限性在于自适应性不足,不能始终提供最佳的控制效果。
论文首先构建了一个简化版的二自由度汽车主动悬架动力学模型,通过对随机路面和凸块路面等典型路况的仿真,确定了悬架系统性能评价的关键指标。为了提升控制性能,作者将粒子群优化(Particle Swarm Optimization, PSO)与反向传播神经网络(BackPropagation Neural Network, BPNN)相结合,优化PID控制器,利用改进的PSO算法优化神经网络权重和阈值,以增强系统的全局优化和收敛性。
接着,论文引入了深度学习技术,提出了基于动态事件触发(Dynamic Event-Triggered, DET)的LSTM主动悬架控制策略。该策略考虑了作动器的输入死区和饱和特性,通过DET控制器有效管理通信资源,以减少不必要的通信,同时利用LSTM网络确保车身垂直加速度趋于零,从而显著提高行驶平顺性。为了补偿减振器中的非线性行为,还采用了径向基函数神经网络进行补偿。
稳定性分析方面,论文借助Lyapunov理论对整个系统进行深入剖析,确保优化控制方法在理论上的稳定性。最后,所有理论和设计都在MATLAB/Simulink环境中得到了验证,这表明作者的方法不仅具有创新性,而且实践性强,对于提升汽车主动悬架的实际性能具有重要意义。
这篇毕业论文围绕汽车主动悬架控制的自适应性、优化策略和深度学习应用进行了深入研究,旨在通过结合多种控制技术和深度学习方法,为智能汽车提供更高效、更舒适的行驶体验。
西安理工大学硕士学位论文
6
势。综合考虑各种控制算法的优缺点,取其优点相互结合,研究开发车辆全状态综合控
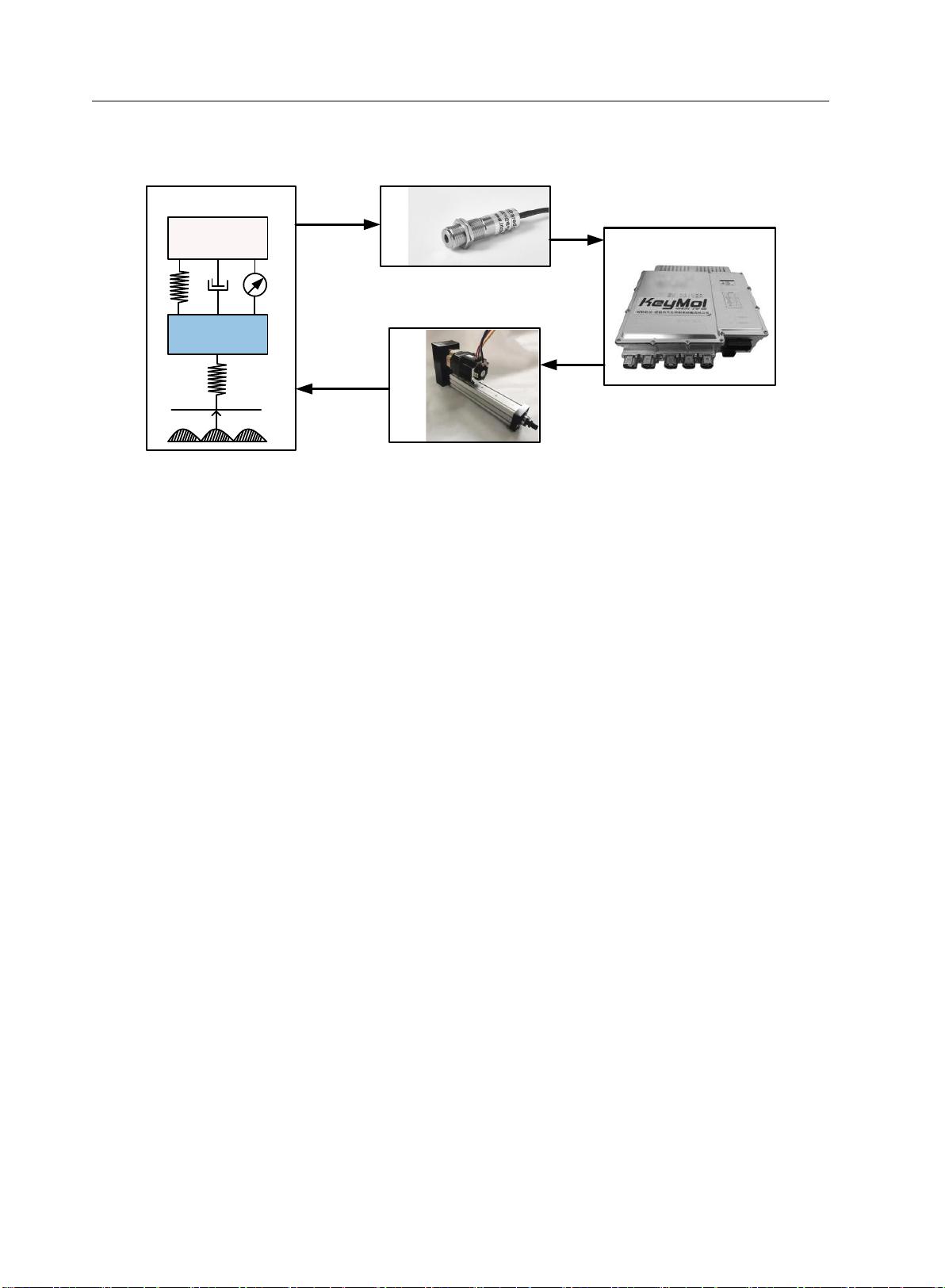
制系统是将来汽车控制算法发展的趋势。汽车主动悬架优化控制原理图如图1-6所示。
图1-6 汽车主动悬架优化控制原理图
Fig.1-6 The schematic diagram of vehicle ASS optimization control
(1)模糊控制
模糊控制是利用模糊数学对被控对象进行控制
[47]
。因此,模糊控制被用于主动悬架
控制中并取得了较为满意的效果。郑玉强等人
[48]
将模糊控制理论应用到主动悬架中,并
在MATLAB/Simulink中对模糊控制的主动悬架系统进行了仿真分析。Liu等人
[49]
针对半
主动悬架系统提出了一种改进的变论域模糊PID控制算法。根据被控对象的响应误差和
其变化率,利用收缩-扩张因子控制器实时调整模糊论域。同时,模糊控制器会实时调整
PID控制算法的参数来进一步得到所需的控制力。通过装备磁流变阻尼器的三层框架结
构对所提出的算法进行了验证。
(2)自适应控制
自适应控制的主要思想是根据系统当前的输入状态,选择合适的控制系数
[50-51]
。自
适应控制算法的控制对象通常是一些包含未知外部因素和随机条件的不确定性系统,比
如汽车在实际情况中,车辆质量、行驶状况和路面情况等都是不确定性因素。因此,自
适应控制算法也被广泛应用于汽车控制中,包括主动悬架的控制。Huang等人
[52]
提出了
一种的鲁棒自适应控制用于非线性主动悬架系统以精确估计汽车基本参数。该算法的自
适应率通过带参数设计误差的项进行更新,通过Carsim和MATLAB的联合仿真证明了所
提出的鲁棒自适应控制器的有效性。Deng等人
[53]
针对刚度未知和路面输入未知的电磁主
动悬架提出了一种事件触发的自适应模糊最优控制策略。该控制策略通过强化学习构造
了模糊系统和虚拟控制率,利用事件触发自适应观测器对未知道路输入进行估计和实现
通信节约,并通过仿真验证了算法的有效性。
(3)神经网络控制
s
m
u
m
2
k
1
k
c
u
主动悬架系统
传
感
器
作
动
器
控制器

剩余69页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-10-27 上传
2023-10-27 上传
2023-10-27 上传
2023-10-27 上传
2023-10-27 上传


xox_761617
- 粉丝: 29
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- exercise4-hannao6:GitHub Classroom创建的exercise4-hannao6
- Excel模板基建预算.zip
- SP21-PUFY1225-DIGITAL-ART
- snapcache:Snapcache 允许用户与他们的朋友创建、共享和发现 geocached 时间胶囊
- pronoun-fitting:使用网络话务台的简单代词试衣间
- heappy:一个快乐的堆编辑器,可支持您的利用过程
- Fox-game
- React-Todo-Custom-Hook
- flatten-object:展平嵌套对象,如果存在冲突,则重命名键
- 北大光华-寻找中国版公募REITs的“价格锚”:商业不动产资本化率调查研究-2019.6-32页(1).rar
- django-postgres-fast-test:使用postgres数据库改善django测试的运行时间
- ejson:EJSON是一个小型库,用于使用非对称加密来管理加密的机密
- 毕业设计&课设--毕业设计-校园二手物品交易管理系统.zip
- Excel模板基本建设财务管理人员备案表.zip
- network-idle-callback:类似于requestIdleCallback,但用于检测网络空闲
- splitwithfriends:全栈营的 AngularNode 演示
