基于卷积神经网络的实时抓取检测
需积分: 50 64 浏览量
更新于2024-09-10
收藏 1.14MB PDF 举报
"实时抓取检测使用卷积神经网络"
本文主要探讨了利用卷积神经网络进行实时抓取检测的方法,特别是在机械臂应用中的创新技术。机械臂在工业自动化、物流和机器人领域扮演着重要角色,而高效准确的抓取检测是实现其自主操作的关键。
作者Joseph Redmon和Anelia Angelova提出了一种基于深度学习的新方法,该方法能够实时预测物体的可抓取边界框,无需传统的滑动窗口或区域提议技术。这一单阶段回归模型不仅提高了检测精度,而且运行速度快,能够在GPU上实现每秒13帧的处理速度,这在实时环境中具有显著优势。
传统的抓取检测方法往往依赖于对图像进行逐窗口分析或先验生成的区域提议,这些方法计算量大,效率较低。而Redmon和Angelova的网络模型通过端到端学习,直接预测出物体的抓取边界框,减少了中间步骤,提升了整体性能。与现有最先进的方法相比,该模型的检测精度提高了14个百分点,显示出优越的性能。
此外,研究者还改进了模型,使其能同时进行分类任务,即在识别物体的同时找到合适的抓取矩形。这种集成化的处理方式大大简化了操作流程,提高了机器人执行任务的效率。
进一步地,他们设计了一个局部约束预测机制,使得模型能够预测每个物体的多个可行抓取点。对于可以以多种方式进行抓取的物体,这个改进模型表现得尤为出色。局部约束预测能够确保提出的抓取策略多样化且适应性强,从而提高抓取的成功率。
总结起来,这篇论文介绍了卷积神经网络在实时机械臂抓取检测中的最新进展。通过高效的网络设计和优化,不仅提高了检测精度,还实现了快速响应,为实际应用中的机器人提供了强大的视觉感知能力。这项工作对于推动机器人智能和自主性的发展具有重要意义,并可能启发更多的研究者探索深度学习在机器人控制和感知领域的应用。
Real-Time Grasp Detection Using Convolutional Neural Networks
Joseph Redmon
1
, Anelia Angelova
2
Abstract— We present an accurate, real-time approach to
robotic grasp detection based on convolutional neural networks.
Our network performs single-stage regression to graspable
bounding boxes without using standard sliding window or
region proposal techniques. The model outperforms state-of-
the-art approaches by 14 percentage points and runs at 13
frames per second on a GPU. Our network can simultaneously
perform classification so that in a single step it recognizes the
object and finds a good grasp rectangle. A modification to this
model predicts multiple grasps per object by using a locally
constrained prediction mechanism. The locally constrained
model performs significantly better, especially on objects that
can be grasped in a variety of ways.
I. INTRODUCTION
Perception—using the senses (or sensors if you are a
robot) to understand your environment—is hard. Visual per-
ception involves mapping pixel values and light information
onto a model of the universe to infer your surroundings. Gen-
eral scene understanding requires complex visual tasks such
as segmenting a scene into component parts, recognizing
what those parts are, and disambiguating between visually
similar objects. Due to these complexities, visual perception
is a large bottleneck in real robotic systems.
General purpose robots need the ability to interact with
and manipulate objects in the physical world. Humans see
novel objects and know immediately, almost instinctively,
how they would grab them to pick them up. Robotic grasp
detection lags far behind human performance. We focus on
the problem of finding a good grasp given an RGB-D view
of the object.
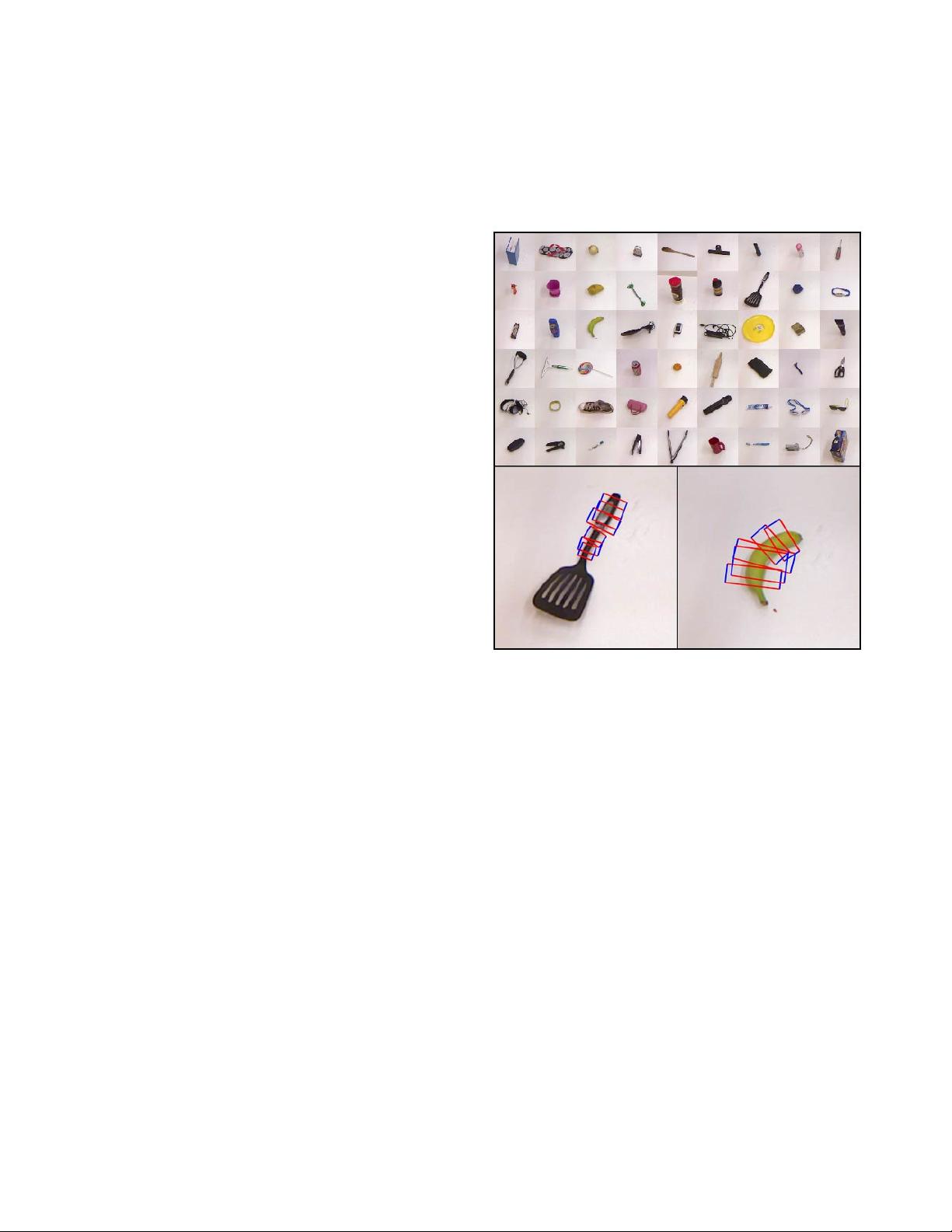
We evaluate on the Cornell Grasp Detection Dataset, an
extensive dataset with numerous objects and ground-truth
labelled grasps (see Figure 1). Recent work on this dataset
runs at 13.5 seconds per frame with an accuracy of 75 percent
[1] [2]. This translates to a 13.5 second delay between a robot
viewing a scene and finding where to move its grasper.
The most common approach to grasp detection is a sliding
window detection framework. The sliding window approach
uses a classifier to determine whether small patches of an
image constitute good grasps for an object in that image. This
type of system requires applying the classifier to numerous
places on the image. Patches that score highly are considered
good potential grasps.
We take a different approach; we apply a single network
once to an image and predict grasp coordinates directly. Our
network is comparatively large but because we only apply
it once to an image we get a massive performance boost.
1
University of Washington
2
Google Research
Fig. 1. The Cornell Grasping Dataset contains a variety of objects, each
with multiple labelled grasps. Grasps are given as oriented rectangles in
2-D.
Instead of looking only at local patches our network uses
global information in the image to inform its grasp predic-
tions, making it significantly more accurate. Our network
achieves 88 percent accuracy and runs at real-time speeds
(13 frames per second). This redefines the state-of-the-art
for RGB-D grasp detection.
II. RELATED WORK
Significant past work uses 3-D simulations to find good
grasps [3] [4] [5] [6] [7]. These approaches are powerful but
rely on a full 3-D model and other physical information about
an object to find an appropriate grasp. Full object models are
often not known a priori. General purpose robots may need
to grasp novel objects without first building complex 3-D
models of the object.
Robotic systems increasingly leverage RGB-D sensors and
data for tasks like object recognition [8], detection [9] [10],
and mapping [11] [12]. RGB-D sensors like the Kinect are
cheap, and the extra depth information is invaluable for
robots that interact with a 3-D environment.
Recent work on grasp detection focusses on the problem
2015 IEEE International Conference on Robotics and Automation (ICRA)
Washington State Convention Center
Seattle, Washington, May 26-30, 2015
978-1-4799-6923-4/15/$31.00 ©2015 IEEE 1316
下载后可阅读完整内容,剩余6页未读,立即下载

fengfeng11246
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
