arduino蓝牙遥控小车制作教程:附源码与关键步骤
版权申诉
78 浏览量
更新于2024-08-03
收藏 1.14MB DOCX 举报
"基于arduino平台的蓝牙遥控小车详细讲解(附带源码程序)"
本文将详细介绍如何构建一个基于Arduino平台的蓝牙遥控小车,并提供相关的源码程序。项目的核心组件包括直流电机、L298N直流驱动模块、Arduino Uno主板以及蓝牙模块。通过这些组件,你可以实现远程控制小车的前进、后退、左转、右转和停止。
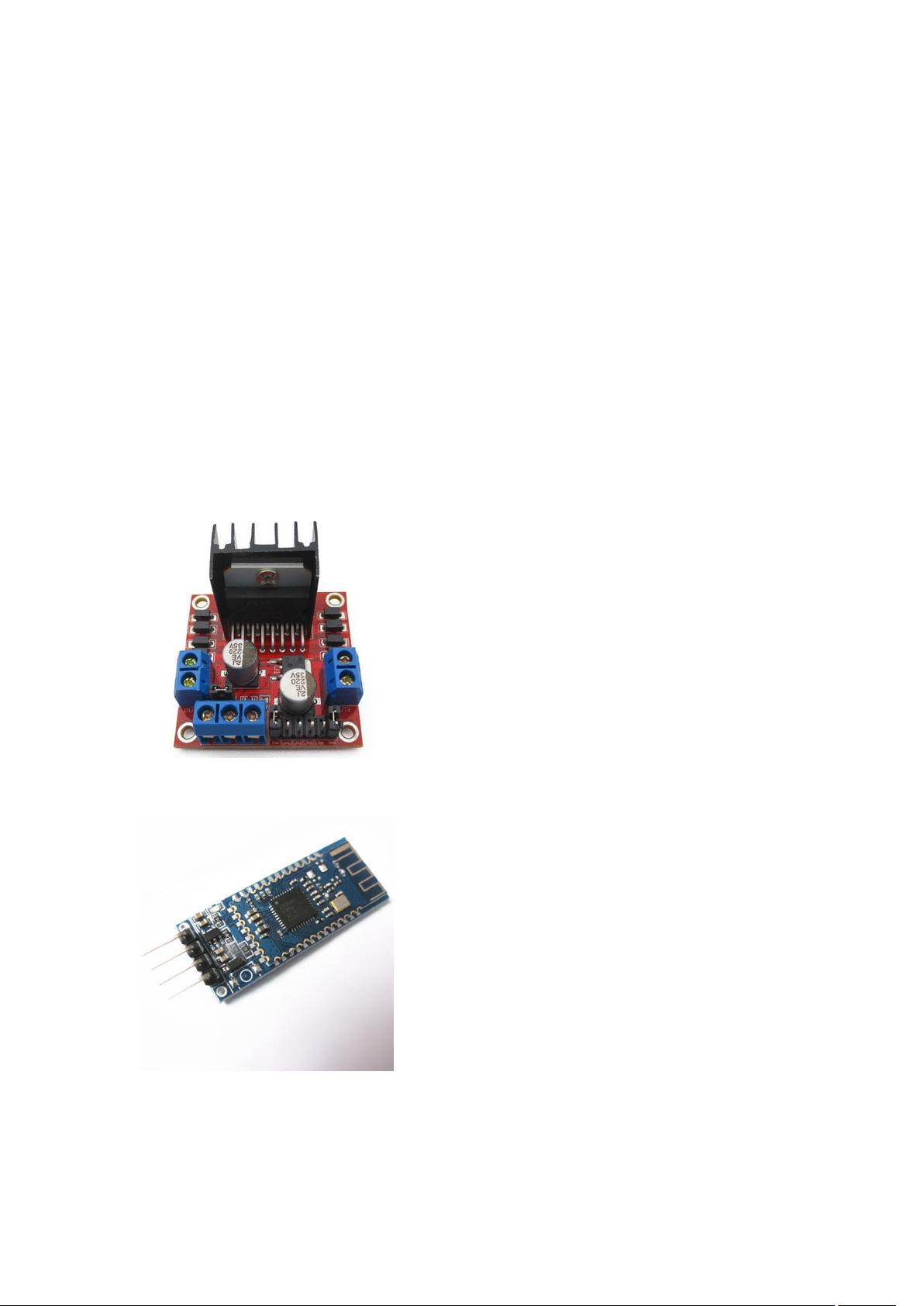
首先,我们需要了解L298N直流驱动模块。L298N是一种双H桥驱动器,能够控制两台直流电机的正反转和速度。在本项目中,电机的正负极分别连接到L298N的负极和正极。为了驱动电机,我们还需要连接Arduino主板。将L298N的IN1、IN2、IN3、IN4引脚分别与Arduino的数字输出引脚9、10、11、12相连,用于控制电机的转向;EN1和EN2引脚则与数字输出引脚6和7相连,用于调节电机的速度。请注意,EN使能端上的跳帽需保持两个引脚串联,以确保电机正常工作。
蓝牙模块用于接收来自手机的无线指令。它有四个引脚,其中TX接Arduino的RX,RX接Arduino的TX,VCC接电源的VCC,GND接电源的GND。这样,蓝牙模块就可以与Arduino主板进行串行通信。
在软件端,你需要安装一个名为“蓝牙串口”的应用程序,以便在手机上搜索并配对蓝牙模块。成功配对后,你可以设置相应的字符命令来控制小车。例如,设置前进为'G',后退为'B',左移为'L',右移为'R',停止为'S'。
以下是一段示例代码,展示了如何在Arduino上实现这些功能:
```cpp
int IN1 = 9; // 控制电机1的引脚
int IN2 = 10;
int IN3 = 11;
int IN4 = 12;
int EN1 = 6; // 电机1的速度控制引脚
int EN2 = 7; // 电机2的速度控制引脚
int A = 80; // 电机速度设定值
int B = 80;
const String GO = "G";
const String BACK = "B";
const String RIGHT = "R";
const String LEFT = "L";
const String STOP = "S";
// 前进方法
void forward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(EN1, A);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(EN2, B);
}
// 后退方法
void backup() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(EN1, A);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(EN2, B);
}
// ...其他转向和停止的方法...
```
通过这个项目,你不仅可以学习到如何使用Arduino控制硬件设备,还能掌握蓝牙通信的基本原理。当你完成所有硬件连接和软件配置后,只需在手机上发送相应的字符命令,就能遥控小车自由移动。这是一项很好的DIY项目,可以帮助你提升电子制作和编程技能。
基于 arduino 平台的蓝牙遥控小车详细讲解(附带源码程序)
一、材料
1. 直流电机
2. L298N 直流驱动
3. Arduino uno
4. 蓝牙模块
5. 框架(这个自定义不做介绍)
二、实物展示
1.L298N 直流驱动
2.蓝牙模块
3.arduino uno
下载后可阅读完整内容,剩余8页未读,立即下载
157 浏览量
2024-08-26 上传
1720 浏览量
327 浏览量
272 浏览量
175 浏览量
371 浏览量
132 浏览量
2025-01-15 上传

xiaoli8748_软件开发
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Struts架构详解:MVC模式与Web应用开发
- Java面试精华:内存管理、多态、垃圾回收与序列化
- C语言实现数据结构:顺序表合并示例与主函数详解
- JAVA设计模式解析:从工厂模式到工厂方法模式
- 探索嵌入式系统入门:Linux与应用前景
- Unicode编程与C++:解析与优势
- 控制流与数据流结合的测试数据自动生成框架
- MFC下ActiveX控件的实战开发与COM组件详解
- Tomcat中配置与使用数据源详解
- 计算机操作系统详解:目标、作用与发展历程
- GCC中文手册:Linux编程指南
- MPI并行编程入门与高级特性探索
- J2EE详解:企业级应用开发的多层架构与核心技术
- Python编程思维与设计模式实战
- .NET编程测试题解析:C#语言与WinForms
- 探索PDA:工作原理、发展趋势与多功能应用
