GPS软件接收机关键技术:基于DFT的捕获与跟踪算法
需积分: 5 162 浏览量
更新于2024-08-11
收藏 320KB PDF 举报
"GPS软件接收的关键技术 (2010年),作者:侯爱琴,宋竹霞,曹正文,来源:西北大学学报(自然科学版),2010年10月,第40卷第5期"
全球定位系统(GPS)是用于定位、导航和时间同步的全球卫星导航系统,而GPS软件接收机则是利用软件来处理GPS信号的一种设备。该研究主要探讨了GPS软件接收机中的核心模块——捕获和跟踪算法的实现。
捕获算法是GPS接收机中的关键步骤,它的目标是从背景噪声和干扰中识别并锁定GPS卫星信号。研究中提到的基于离散傅里叶变换(DFT)的频域快速相乘相关算法在捕获模块中被采用。这种方法利用DFT对信号进行频域分析,通过计算相位关系来确定载波频率,从而更精确地捕获到卫星信号。此外,研究还优化了计算过程,以提高效率,满足实时性的需求。
跟踪算法则是在捕获到信号后,保持对信号的持续追踪,以确保接收机能够稳定接收和解码数据。文中采用了软件锁相环路(PLL)作为跟踪算法,这是一种常用的信号处理技术,能够在信号存在微小频率偏移时调整接收机的本地载波频率,确保信号的同步。
MATLAB仿真被用来验证这两种算法的效果。通过仿真实现了捕获和跟踪的全过程,结果显示相关点的峰值超过了预设的阈值,这表明GPS信息已被成功捕获并跟踪。研究结论指出,这种基于DFT的频域相关优化算法不仅能够实现精确的信号捕获,而且适用于实时系统,为软件接收机设计提供了一种实用的解决方案。
关键词涉及到的领域包括全球定位系统的基本原理,软件接收机的设计与实现,以及信号处理中的码相关(对应于伪随机码的检测)和载波跟踪(确保数据解调所需的载波相位同步)。这些关键词反映了研究的核心内容,即GPS接收机在信号处理上的关键技术。
这篇论文深入研究了GPS软件接收机中的关键技术,特别是在捕获和跟踪算法上的创新,为GPS接收机的软硬件设计提供了理论支持和实践指导。通过MATLAB仿真验证,证明了所提出的算法的有效性和实用性,对于提升GPS接收机的性能具有重要意义。
JNWU
西北大学学报(自然科学版)
2010
年
10
月,第
40
卷第
5
期,
Oct.
,2010 ,
Vo
l.
40
,No.5
Journal
of
Northwest
University
(Natural Science Edition)
GPS
软件接收的关
侯爱琴,宋竹霞,曹正文
技术
(西北大学信息科学与技术学院,陕西西安
710127)
摘要:目的讨论
GPS
软件接收机中核心模块的实现算法,重点研究捕获算法。方法
在捕获模
块中采用基于
D
凹的频域快速相乘相关算法,通过相位关系计算出精确的载波频率,同时优化计
算;跟踪算法采用软件锁相环路
(PLL)
实现,。结果
用
MATLAB
仿真实现了捕获跟踪过程,相关
点峰值高于预设的闽值,成功捕获了
GPS
信息。结论
所采用的基于
D
町的频域相关优化算法不
仅实现了准确的相关捕获,且可适应实时性需要,为软件接收机的设计实现提供了一种有效的算
法。
关键词:全球定位系统;软件接收机;王相关;码跟踪;载波跟踪
中图分类号
:T
P3
11
文献标识码
:A
文章编号
:1
∞
0-274
X (2010)05
-0
760
-04
The key technology of GPS software receiver
HOU
Ai-qin ,
SONG
Zhu-xia ,
CAO
Zheng-wen
(Sc
h
∞
1
of
Infonnation
Science
and
Technology
,
Northwest
University
,Xi'an
710127
, China)
Abstract:
Aim
To discuss
the
key implementation algorithms for GPS software receiver. Emphasize on acquisition
módule.
Methods
币
le
correlation algorithm
based
on DFT which
can
fast multiply
in
frequency field
is
used
in
the
acquisition module.
Th
en
a more
accurate
carrier
frequency is calculated by a phase relationship. Optimization al-
gorithm is
used
in
the
calculation. As for tracking module ,
the
software
phase
lock loop
(PLL)
is
used.
Results
A processing of acquisition
and
tracking was simulated by
MATLAB.
咀
le
peak
value of correlation point was higher
than
the presumed threshold.
Th
e GPS information was
acquired
successfully.
Conclusion
咀
le
optimized
fre
职
en
cy field correlation algorithm
based
on
DFT not only
has
realized acquisition correctly,
but
also
can
adapt
to real-
time needs.
Th
is
algorithm
can
be
used
to software GPS receiver effectively.
Key
words:
GPS
(global
positioning system) ; software
receiver;
correlation ; code
tracking;
carrier
tracking
全球定位系统
(GPS)
在航空航海、陆上交通、地
理测量、气象预报、系统监控等领域的应用日益广
泛。传统的
GPS
硬件接收机基于专用的
AISC
芯
片,用户可通过二次开发设计出特定的
GPS
接收
机,但若卫星系统或参数等改变,则需重新开发,成
本相对较高。
GPS
软件接收机由射频前端硬件和信
号处理程序构成
[1]
。若需对接收机进行修改和升
级,只需要进行软件修改,灵活方便,且成本低、开
发速度快。本文重点论述
GPS
软件接收技术中核
心模块的实现算法。
收稿日期
:2(
泊
9
-04
-11
1
GPS
软件接收机概述
GPS
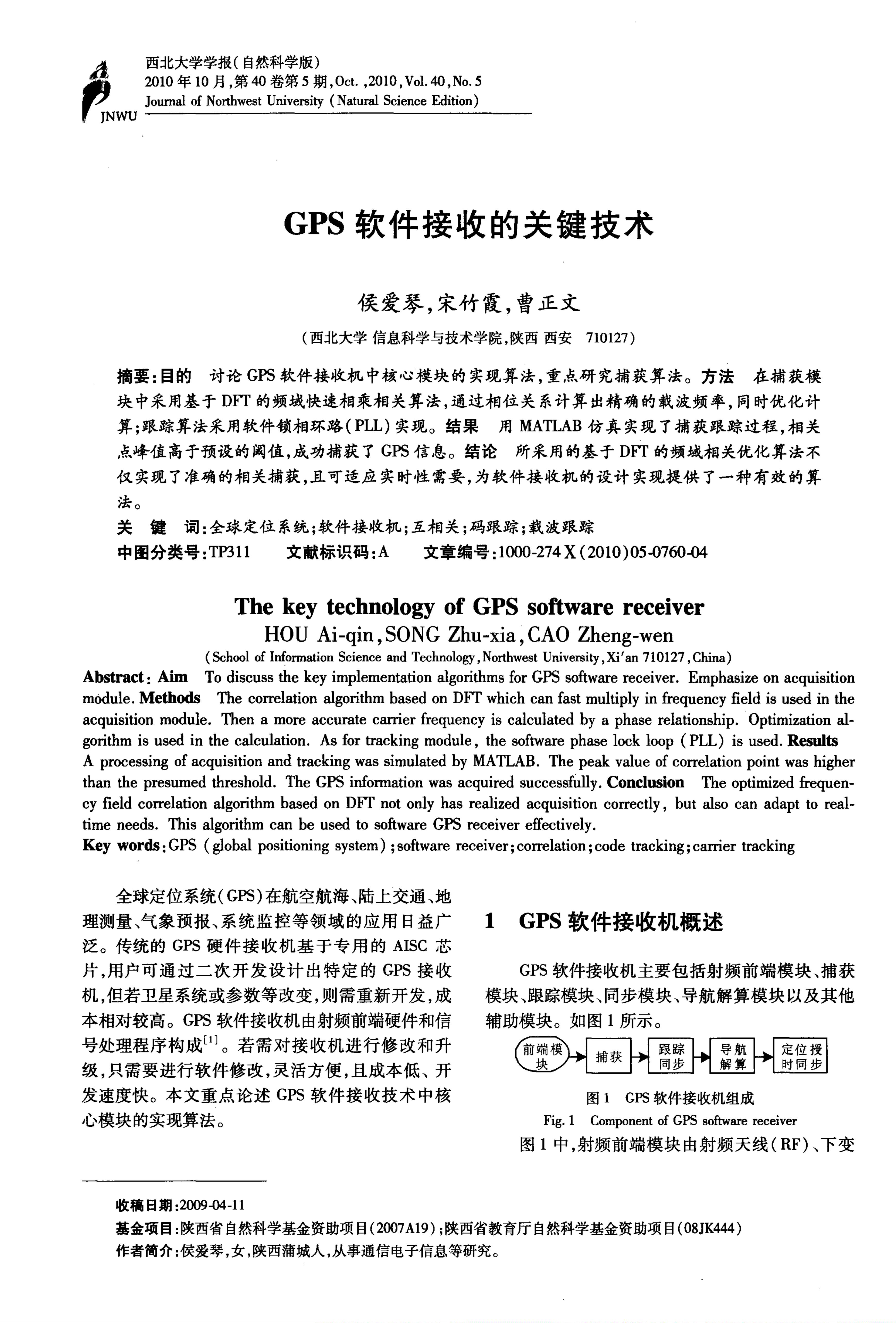
软件接收机主要包括射频前端模块、捕获
模块、眼踪模块、同步模块、导航解算模块以及其他
辅助模块。如图
1
所示。
捕获
跟踪
同步
导航
解算
图
1
GPS
软件接收机组成
定位授
时同步
Fig.
1
Component
of
GPS
software
receiver
图
1
中,射频前端模块由射频天线
(RF)
、下变
基金项目:陕西省自然科学基金资助项目
(2
∞
7
A19)
;陕西省教育厅自然科学基金资助项目
(08JK444)
作者简介:侯爱琴,女,陕西蒲城人,从事通信电子信息等研究。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-07 上传
2021-09-08 上传
2021-10-06 上传
2020-07-28 上传
2010-02-15 上传
2016-09-22 上传

weixin_38745648
- 粉丝: 7
- 资源: 909
 我的内容管理
展开
我的内容管理
展开







最新资源
- JS-CryptoConverter:与多个密码进行相互转换
- NXP i.MX RT1052 RT-Thread实战:裸机系统与多线程系统【基于Cortex-M4】
- Python库 | javascript-1!0.2.15-py3-none-any.whl
- 论坛
- n2n_v3_linux_mips64_v2.9.0_r873_all_by_heiye.zip
- 基于Python+Flask的英语学习网站-毕业设计源码+使用文档(高分优秀项目).zip
- learn-git:学习git github
- 【数字电路】ms14-检波器.zip
- 网站网页源码模板 (231).zip
- NoOS:在当前操作系统上运行的操作系统启动器
- Python库 | google_nest_sdm-1.8.0.tar.gz
- yuchen-tasklist:一个简单的karaf OSGi Web任务列表应用程序
- Axe:Axe 是一个面向开发人员的简单的 WordPress 入门主题
- rx-extended:通过 Rx 编程潜水时的发现、助手和任何我觉得有趣的东西
- project:Drago Extension(@ drago-ex)上的新项目的基础
- PHP实例开发源码—引客来网络贷款超市分销系统.zip
