"机器人学基础:运动学教案与实例介绍"
版权申诉
127 浏览量
更新于2024-04-04
收藏 1.77MB PPTX 举报
Robot kinematics is a fundamental aspect of manipulator robotics that involves two key tasks: direct kinematics and inverse kinematics. Direct kinematics entails determining the orientation and position of the end effector based on the joint relations (rotations and translations) of the robot arm. In contrast, inverse kinematics involves calculating the joint rotations and orientations required to achieve a desired end effector position and orientation.
This concept was discussed in detail in the "Robotics Basics - Robot Kinematics" PowerPoint presentation. The presentation covered various topics such as the importance of direct and inverse kinematics in robot motion planning, as well as the mathematical principles and algorithms involved in solving kinematics problems.
One illustrative example provided in the presentation demonstrated direct kinematics by showing how the orientation and position of the end effector can be determined based on the known joint rotations and translations of the robot arm. This example highlighted the practical application and relevance of kinematics in robotics, emphasizing its role in enabling precise and efficient motion control of robotic manipulators.
Overall, understanding robot kinematics is essential for developing advanced robotic systems and automation technologies. By mastering the concepts of direct and inverse kinematics, engineers and researchers can design and operate robots with improved accuracy, flexibility, and reliability, opening up new possibilities for various industrial and scientific applications.
11
Euler angle to
represent motion pose
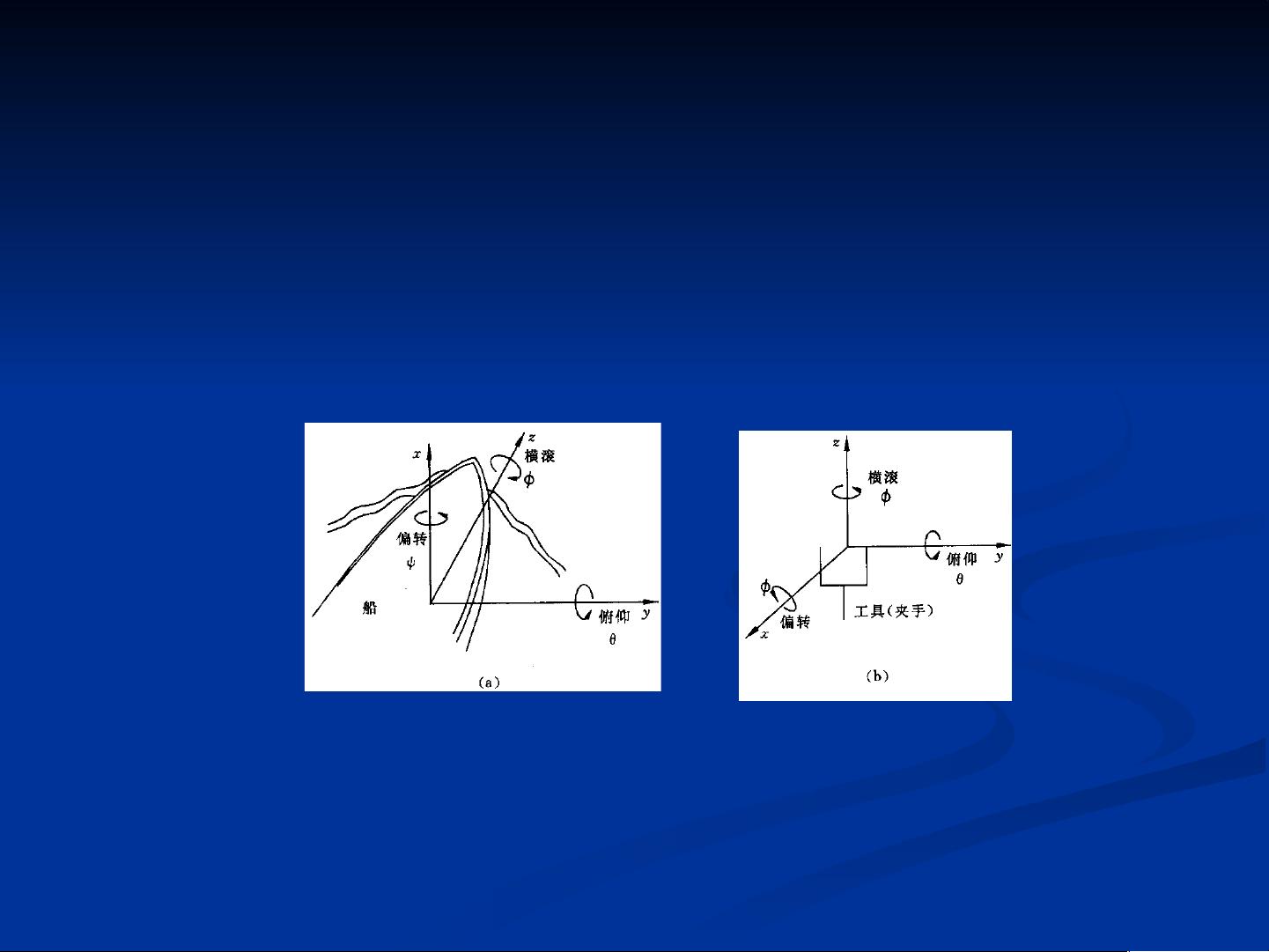
机械手的运动姿态往往由
一个绕轴 x
,
y 和 z 的旋转
序列来规定。这种转角的
序列,称为欧拉( 2 )
角。
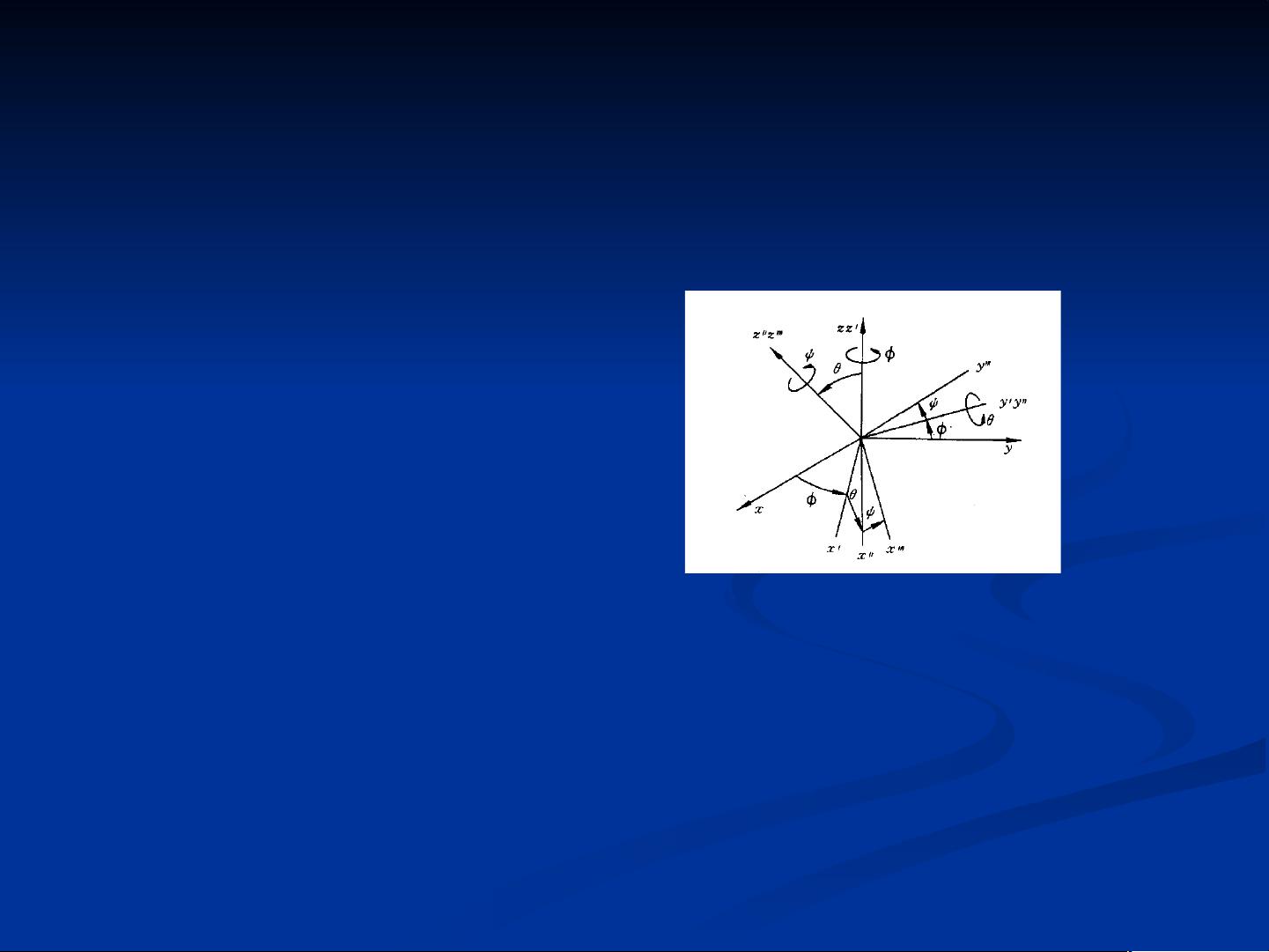
欧拉角 用一个绕 z 轴
旋转 ф 角,再绕新的 y 轴
y3 旋转 θ 角,最后绕新的
z 轴 z33 旋转 ψ 角来描述任
何可能的姿态。
欧拉变换 Euler 可由连乘三个
旋转矩阵来求得,即
( ,, )
3.1 Representation of Kinematics Equation of Manipulator
第 10 页 / 共 67 页
3.2图 欧拉角的定义
),(),(),(),,(
zR otyRotzRotEuler

剩余63页未读,继续阅读
2021-10-05 上传
2021-10-05 上传
2021-10-05 上传
2024-10-30 上传
2023-06-02 上传
2023-05-29 上传
2023-03-17 上传
2024-10-30 上传
2023-05-31 上传

加油学习加油进步
- 粉丝: 1402
- 资源: 52万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
