群目标结构建模与多伯努利滤波估计:图论方法
62 浏览量
更新于2024-07-14
收藏 1.36MB PDF 举报
本文主要探讨了在杂乱环境下的多可分辨群目标估计问题,利用图论和多伯努利滤波器进行结构建模和估计。作者们关注的是在复杂背景下,如何有效地处理目标群体的信息,并准确估计群体的各个个体状态以及群体整体特性。
首先,论文提出了一种动态模型和观测函数,针对群目标的运动和测量特性进行了系统化建模。动态模型考虑了群内目标之间的依赖关系,包括它们的位置、速度、方向等随时间变化的状态。而观测函数则定义了在杂乱背景中,传感器如何从观测数据中提取群目标的信息,如反射回波信号。
其次,通过预测的目标状态,作者们进一步挖掘了群内个体目标之间的关联性。这种连接关系对于理解和推断群体行为至关重要,因为它允许算法在估计单个目标的同时,也能够估计整个群体的状态,如群体大小和形状等关键特征。这一步骤利用了图论的工具,将目标间的相互作用视为网络中的节点和边,从而构建出一个表示目标间依赖关系的图模型。
接着,作者们引入了多伯努利滤波器,这是一种适用于处理随机有限集合的估计方法,特别适合于处理具有不确定性和噪声的估计问题。通过多伯努利滤波器,可以迭代地更新每个目标的状态概率分布,同时考虑到它们之间的相互影响,从而得到更精确和鲁棒的估计结果。
文章历史部分显示,该研究经历了从最初的提交到多次修订的过程,直到2017年11月获得接受,这表明作者们对方法的深入研究和不断完善。关键词"可分辨群目标"、"依赖关系"、"随机有限集"、"图论"和"多伯努利滤波器"都突出了本文的核心内容和研究重点。
总结来说,这篇研究论文提供了一种有效的方法,通过结合图论和多伯努利滤波器技术,解决在杂乱环境中对多可分辨群目标的实时估计问题,为群体目标跟踪、监测和理解提供了重要的理论支持和技术手段。这种方法对于军事、航天、交通等领域,特别是在高密度目标环境下的应用具有实际价值。
W. Liu et al. / Automatica 89 (2018) 274–289 277
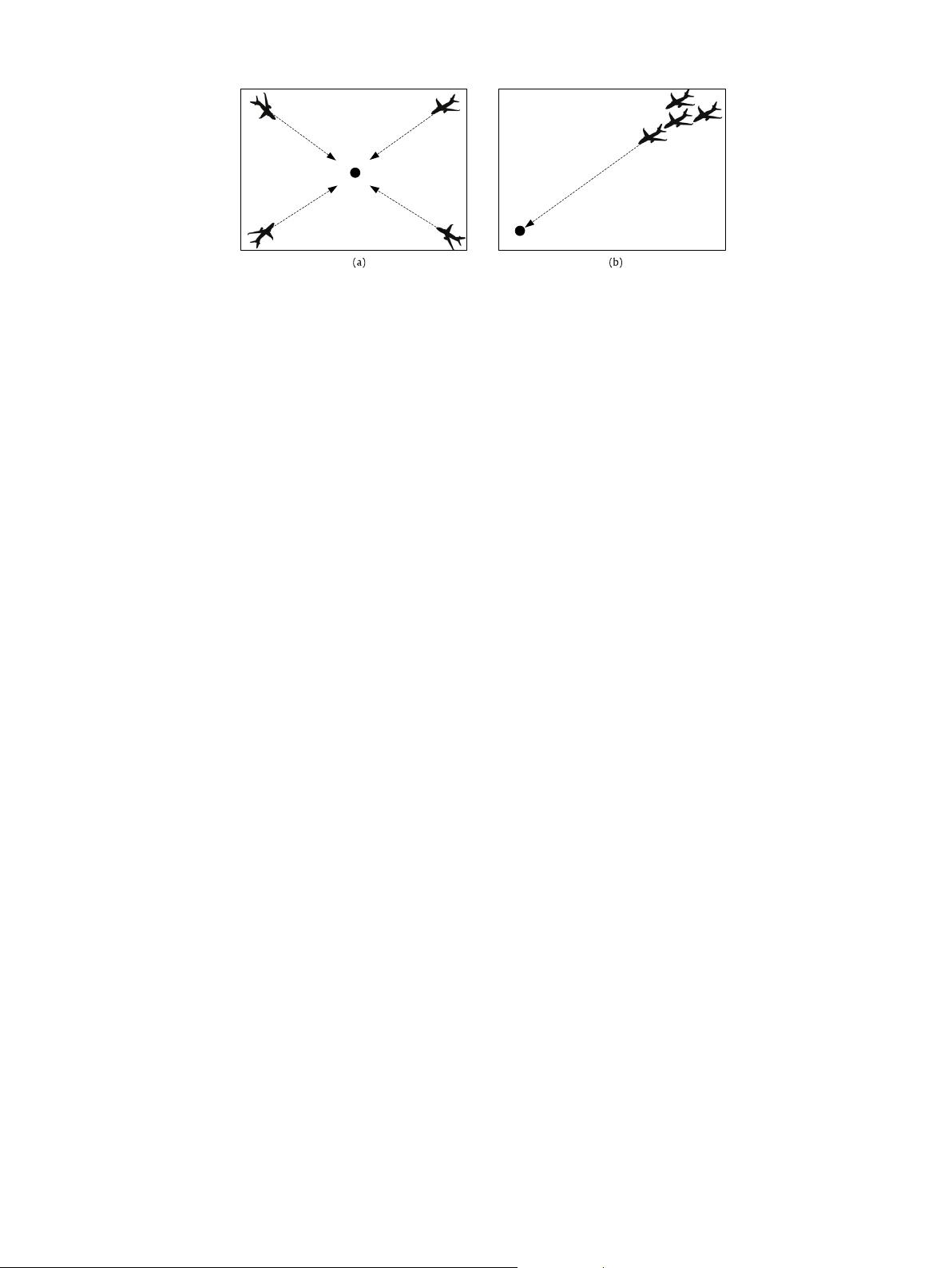
Fig. 1. The group is in collaboration. (a) Four targets of a group move to a collective point from four positions; (b) Four targets of group forming a formation move to a point.
Throughout this paper, we assume that graph G
k
is a simple graph
and has no loops. According to whether each edge has an assigned
orientation, a graph can be classified into the undirected graph and
directed graph (digraph), respectively.
A digraph is a graph in which the edges have direction. This
is usually indicated with an arrow on the edge; more formally, if
v
k,i
and v
k,j
are vertices, an edge is an unordered pair {v
k,i
, v
k,j
},
while a directed edge, called an arc, is an ordered pair (v
k,i
, v
k,j
) or
(v
k,j
, v
k,i
). The arc (v
k,i
, v
k,j
) is drawn as an arrow from v
k,i
to v
k,j
(Guichard, 2014).
Definition 1. Two vertices v
k,i
and v
k,j
of a graph G
k
are said to be
connected if there is a path (v
k,i
, v
k,j
) in G
k
.
We further refer the following definition of a tree (Guichard,
2014):
Definition 2. A connected graph G
k
is a tree if it is a acyclic, that is,
it has no cycles. More generally, an acyclic graph is a forest.
In essential, from the viewpoint of graph theory, each group is
like a tree in the forest (all groups). Whether undirected graph or
digraph can be expressed by an adjacency matrix A(V
k
) defined by
A : V
k
× V
k
→ {0, 1}, where 0 denotes that the any two vertices
are not adjacent, otherwise adjacent. Therefore, the adjacency
matrix for undirected matrix is symmetric, while digraph often
asymmetric.
3. Dynamic models for group targets
3.1. Dependent relation for group targets
Different from common multi-target tracking, the group target
tracking focus on the group state, group dependent relation and
number of subgroups. A primary issue is to judge whether multiple
targets belong to group targets. That is to say, what are the group
targets indeed? In our idea, the group targets are the multiple
targets which move in certain mode of collaboration.
The term collaboration here has a very broad meaning. For
examples, sub-figure (a) of Fig. 1 shows that four targets take off
from several sites and fly to a default point at the same time.
Although the four targets have not a fixed formation and shape,
they are collaboration in the space and time and constitute a group.
Another scenario is shown in sub-figure (b), where four targets
keep a formation and thus are looked as group targets. In this paper,
we mainly focus on the second case of multiple formations which
remain fixed structure as sub-figure (b) of Fig. 1. Hence, we first
propose the following definition for group targets.
Definition 3. Group targets are a set of state points and the state
points move in state space in certain mode of collaboration.
In this definition, the key is the movement of collaboration.
Here, the collaboration denotes there are some kinds of dependent
relation between the targets. The group targets may involve multi-
ple subgroups and in each subgroup the targets are dependent and
form a connected graph. In special case, if the numbers of targets
in each subgroup reduces to one, the group targets will reduce to
the normal case of multiple targets.
Graph theory provides a powerful tool in modeling the de-
pendence between vertices and it has been successfully used in
formation control of flying vehicles (Anderson, Yu, & Fidan, 2006;
Yu, Hendrickx, Fidan, Anderson, & Blondel, 2007) and multi-agent
system control (Ferber, 1999). Inspired by the success, we combine
the graph theory with group targets and define the group targets
with graph structure G
k
as follows:
Definition 4. Given group targets with fixed number of targets
X
k
= {x
k,1
, . . . , x
k,N
k
} at time step k, the group targets with digraph
structure G
k
= (V
k
, E
k
), where vertex set V
k
is given by X
k
, i.e., V
k
≜
X
k
. The edge set E
k
is defined by the dependent relation between
the vertex set E
k
≜ X
k
× X
k
.
Remark 1. The structure of group targets can be seen as a kinds of
digraph. Specifically, according to their dependent relation, some
vertices (targets) are parents and some are children. Besides, the
group targets X
k
may involve multiple subgroups with different
structures. We analyze the structures of individual subgroups on
graph G
k
.
3.2. Group target dynamic models
Consider the following linear models for a target x
k,i
in group X
k
with digraph structure G
k
given by:
x
k+1,i
=
l∈P(i)
ω
k
(l, i)[F
k,l
x
k,l
+ b
k
(l, i)] + B
k,i
w
k,i
(17)
z
k+1,i
= H
k+1
x
k+1,i
+ v
k+1,i
(18)
x
k,i
∈ X
k
,
l∈P(i)
ω
k
(l, i) = 1, ω
k
(l, i) ∈ [0, 1] (19)
where w
k,i
∼ N (0, Q
k,i
), Q
k,i
is covariance matrix of process noise,
b
k
(l, i) is a standard (or required) displacement vector between
vertex i and its father vertex l, P(i) is a vertex set and denotes all the
father vertices for vertex i. If P(i) is a empty set ∅, let P (i), b
k
(l, i)
be i and zero, respectively. For simplicity, the weighted coefficients
{ω
k
(l, i), l ∈ P(i)} imply a convex combination of various vectors
{F
k,l
x
k,l
, l ∈ P(i)}. In short, the target i is dependent on the states of
its parents.
Besides, different from the usual multi-target dynamic models,
which is shown by Eq. (20), Eq. (17) has nothing to do with its
剩余15页未读,继续阅读
2020-12-15 上传
2021-03-14 上传
2021-03-29 上传
2021-03-09 上传
2021-03-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38732425
- 粉丝: 6
- 资源: 942
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
