三菱电机伺服驱动技术解析
需积分: 9 53 浏览量
更新于2024-07-09
收藏 175KB PPT 举报
"三菱电机伺服原理.ppt"
三菱电机的伺服系统主要由伺服放大器、主回路、控制回路以及编码器等关键组件构成,这些组件协同工作以实现高精度的位置、速度和转矩控制。
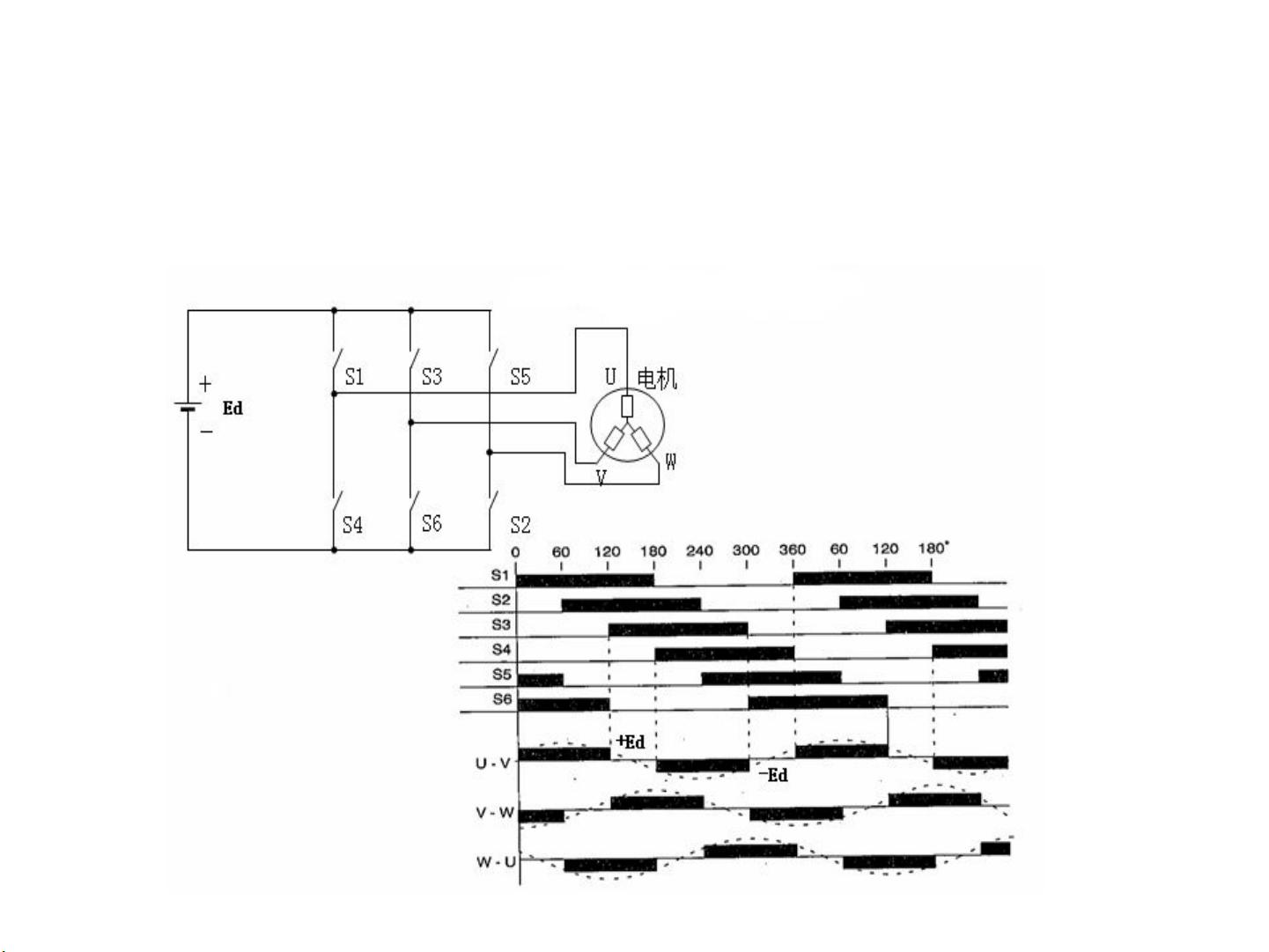
主回路是伺服系统的动力心脏。它包括三相整流部分,通过D1至D6六个二极管将交流电源转换为直流电压。平滑电容器的作用是滤波,确保直流电压的稳定。输出模块负责将直流电压转化为适合电机运行的电流。再生制动是一种节能机制,当电机实际转速超过指令速度时,电机将产生回馈能量,再生制动回路能够处理这些能量,防止电网电压波动。根据容量的不同,再生制动回路有电容再生、电阻再生和电源再生三种方式。
动态制动是一种快速停止电机的方法,通常需要额外的外加电阻器。当基极断路时,电阻器短路电机端子,消耗旋转动能,使电机迅速停止。
控制回路采用三环控制,即位置环、速度环和电流环。位置环控制是通过脉冲指令来实现精确定位的。每个脉冲输入会使偏差计数器增加1,然后转换为电压信号,驱动放大器生成SPWM波形控制电机旋转。编码器的反馈脉冲与指令脉冲进行比较,调整电机位置。速度环控制则通过比较速度指令与编码器反馈的脉冲速度,调整电流环输出以消除速度偏差。
伺服控制主要有三种方式:转矩控制、速度控制和位置控制。转矩控制通过设定外部模拟量或直接地址值来控制电机输出的转矩;速度控制则是通过模拟量输入或脉冲频率调节电机速度;而位置控制是最常见的,它通过脉冲频率确定速度,脉冲个数决定角度,适用于高精度定位应用。
编码器是伺服系统的关键传感器,分为增量型和绝对值型。增量型编码器通过检测A、B、Z相的光信号变化来计算位移和速度,而绝对值型编码器除了具有增量型的功能外,还具有掉电保持记忆功能,即使在电源中断时也能保持位置信息。
在AC伺服系统中,定位控制是至关重要的。它可以实现不同类型的定位,如速度定位、位置定位等,这使得伺服系统在自动化设备和精密加工中得到广泛应用。
2. 输出模块
剩余14页未读,继续阅读
2021-11-28 上传
2022-12-07 上传
2021-10-07 上传
2021-09-03 上传
2021-09-03 上传
2021-10-07 上传
2021-11-28 上传
2021-10-10 上传
2022-12-25 上传

m0_53197545
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
