控制系统超前校正设计详解与MATLAB实现
版权申诉
2 浏览量
更新于2024-06-26
收藏 1.28MB PDF 举报
控制系统的超前校正设计是一种用于改善系统动态性能的技术,通过在系统中引入额外的相位补偿,确保系统在高频段的稳定性。以下是设计过程中的关键步骤:
1. 设计原理与步骤:
- 确定开环增益:首先,根据给定的稳态性能指标(例如,静态速度误差系数 Kv),计算系统的开环增益 K。这个步骤保持系统在静态条件下的性能不变。
- 绘制未校正伯德图:利用计算得到的 K,绘制系统的开环频率响应图(伯德图),评估未校正系统的相位裕度和幅值裕度。
- 确定超前相角:量取相位裕度,计算需要补偿的超前相角 ,等于给定相位裕度指标 减去未校正系统的相位裕度 0,再加上一个附加角度 ,用来补偿因超前校正造成的负相角变化。
- 选择校正参数:根据系统剪切率选择合适的 值(如 -20dB、-40dB 或 -60dB 时对应的范围),并计算最大超前相角出现在校正后截止频率处所需的 T 参数。
- 构建超前校正传递函数:根据 T 参数,构建超前校正装置的传递函数 Gc(s),表达为 Gc(s) = 1 + aTs / (1 + Ts),其中 a = 1 + sin(m) / (1 - sin(m)),m 是超前相角。
- 校验与调整:校验校正后的系统性能,通过绘制校正后的伯德图,检查是否满足给定的性能指标。如果不满足,可以适当增大 值并重新调试。
2. 初始状态分析与 MATLAB 实现:
- 对于初始条件,由于已知静态速度误差系数 Kv 的限制,可以通过解方程找到对应的开环增益 K。对于给定的系统动态特性(例如,G(s) = 6s(1+0.1s)(1+0.3s)),可以使用 MATLAB 的 `tf` 函数建立模型并计算其稳定性相关指标,如 margin 函数用于评估系统稳定性。
通过以上步骤,控制系统的超前校正设计旨在优化系统的动态响应,确保在高频区的稳定性和快速性,同时维持或提升系统在低频区域的稳态性能。这是一项技术性很强的工作,需对控制系统理论有深入理解,以便在实践中进行精确调整和优化。
下载可编辑
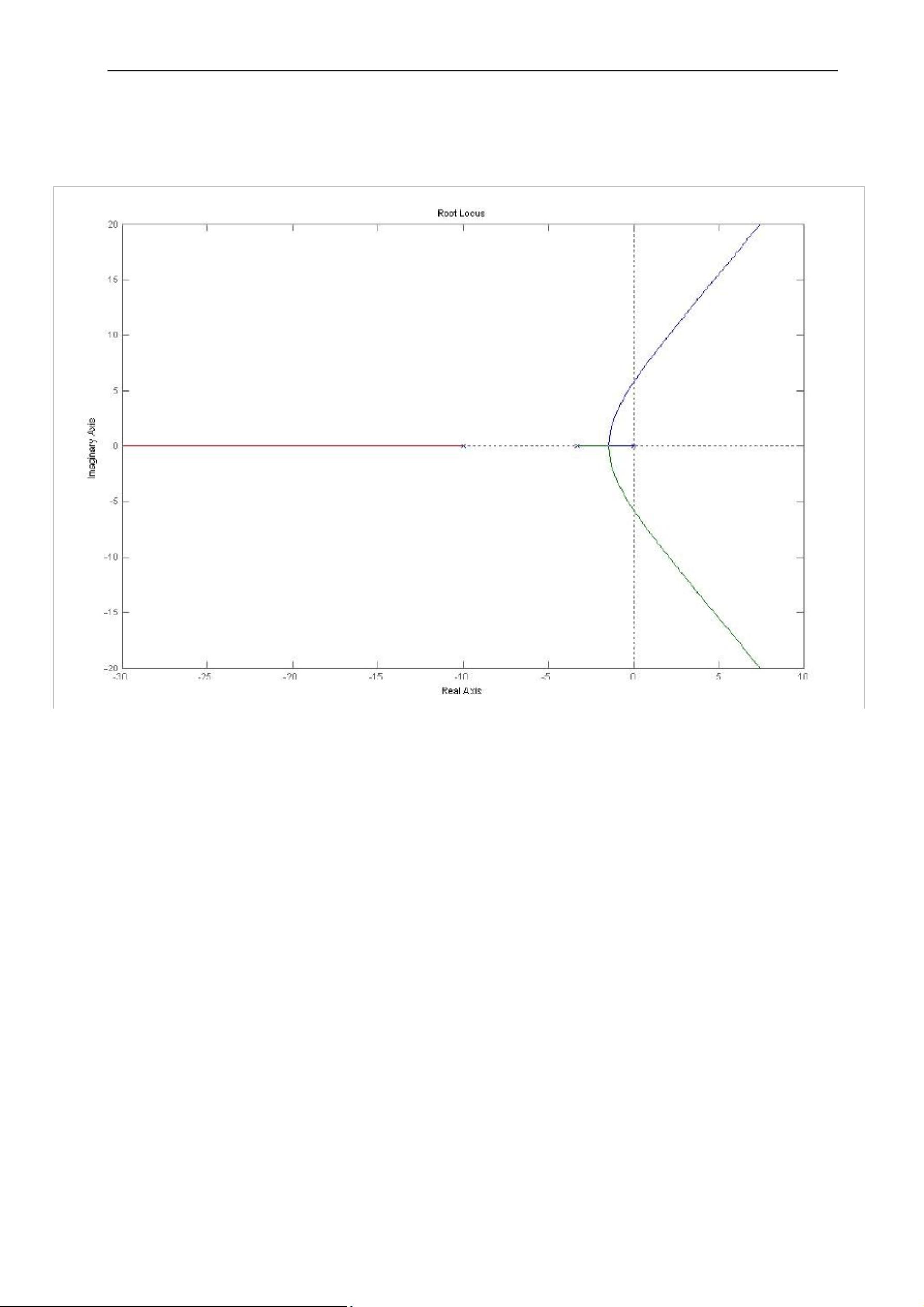
den=[0.03,0.4,1,0]; %描述系统分母多项式
rlocus(num,den); %计算出系统根轨迹
2.2 超前校正分析及计算
2.2.1 使用频域法确定超前环节函数
利用超前网络的相位超前特性,正确的将超前网络的交接频率 1/aT 和 1/T 选在待校
正系统截止频率的两旁,并选择适当参数 a 和 T,就可以使已校正系统的截止频率和相角
裕度满足性能指标的要求。
计算为使相位裕度达到给定指标所需补偿的超前相角
0
取
|
G
0
(
j
'
c
)
H
(
j
'
c
) |
|
G
0
(
j
c
)
H
(
j
c
) |
,由未校正系统的伯德图可知当前未校正
.专业.整理.
剩余15页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-12-22 上传
2021-07-10 上传
2021-07-10 上传
2021-10-31 上传
2021-06-29 上传
2022-06-09 上传

hhappy0123456789
- 粉丝: 77
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







