NOIP图算法详解:基础与应用
需积分: 9 4 浏览量
更新于2024-07-29
收藏 628KB PDF 举报
"NOIP图的基础算法包括图的表示方法、最小生成树算法以及最短路径算法。"
在NOIP(全国青少年信息学奥林匹克竞赛)中,图的基础算法是解决问题的关键部分。图是一种重要的数据结构,用于表示对象之间的关系。以下是对这些基础算法的详细说明:
1. **图的表示**
- **邻接矩阵**:使用一个二维数组来存储图中顶点之间的关系。对于无向图,数组的[i][j]和[j][i]表示顶点i和j之间是否存在边;对于有向图,仅[i][j]表示从i到j有边。邻接矩阵的空间复杂度是O(|V|^2),其中|V|是顶点的数量。适用于稠密图,即边的数量接近于顶点数量的平方。
- **邻接链表**:每个顶点维护一个链表,链表中的元素表示与其相邻的顶点。无向图需要在两个顶点的链表中都添加边的信息。邻接链表的空间复杂度是O(|E|),其中|E|是边的数量,适合于稀疏图。
2. **最小生成树算法**
- **Prim算法**:从一个顶点开始,逐步增加边,每次选择连接两个已连接集合的边,使得增加的边权值最小,直到连接所有顶点。
- **Kruskal算法**:按边的权值从小到大排序,依次考虑每条边,如果加入这条边不会形成环,则添加到当前的生成树中。
3. **最短路径算法**
- **Dijkstra算法**:用于寻找单源最短路径,通过贪心策略每次扩展距离源点最近的未访问节点,直到到达目标节点。适用于没有负权边的图。
- **Bellman-Ford算法**:通过松弛操作更新所有边的最短路径,可以处理含有负权边的图,但时间复杂度较高。
- **SPFA算法**:Shortest Path Faster Algorithm,一种基于队列的Bellman-Ford变体,通常比原版Bellman-Ford效率更高。
- **Floyd算法**:也称为Floyd-Warshall算法,用于求解所有顶点对间的最短路径,通过动态规划填充一个距离矩阵。
在C++中实现图的深度优先遍历(DFS),需要定义数据结构如`graph_node`表示图的节点,`AdjList`表示邻接链表的节点,并使用`visited`数组记录每个节点是否已被访问。遍历过程通常从一个未访问的节点开始,标记为已访问,然后递归地访问其相邻节点,直至所有节点都被访问。
NOIP中的图基础算法是解决各种图论问题的核心工具,包括构建网络、优化路径和搜索问题等。理解和熟练掌握这些算法对于信息学竞赛和实际编程问题的解决至关重要。
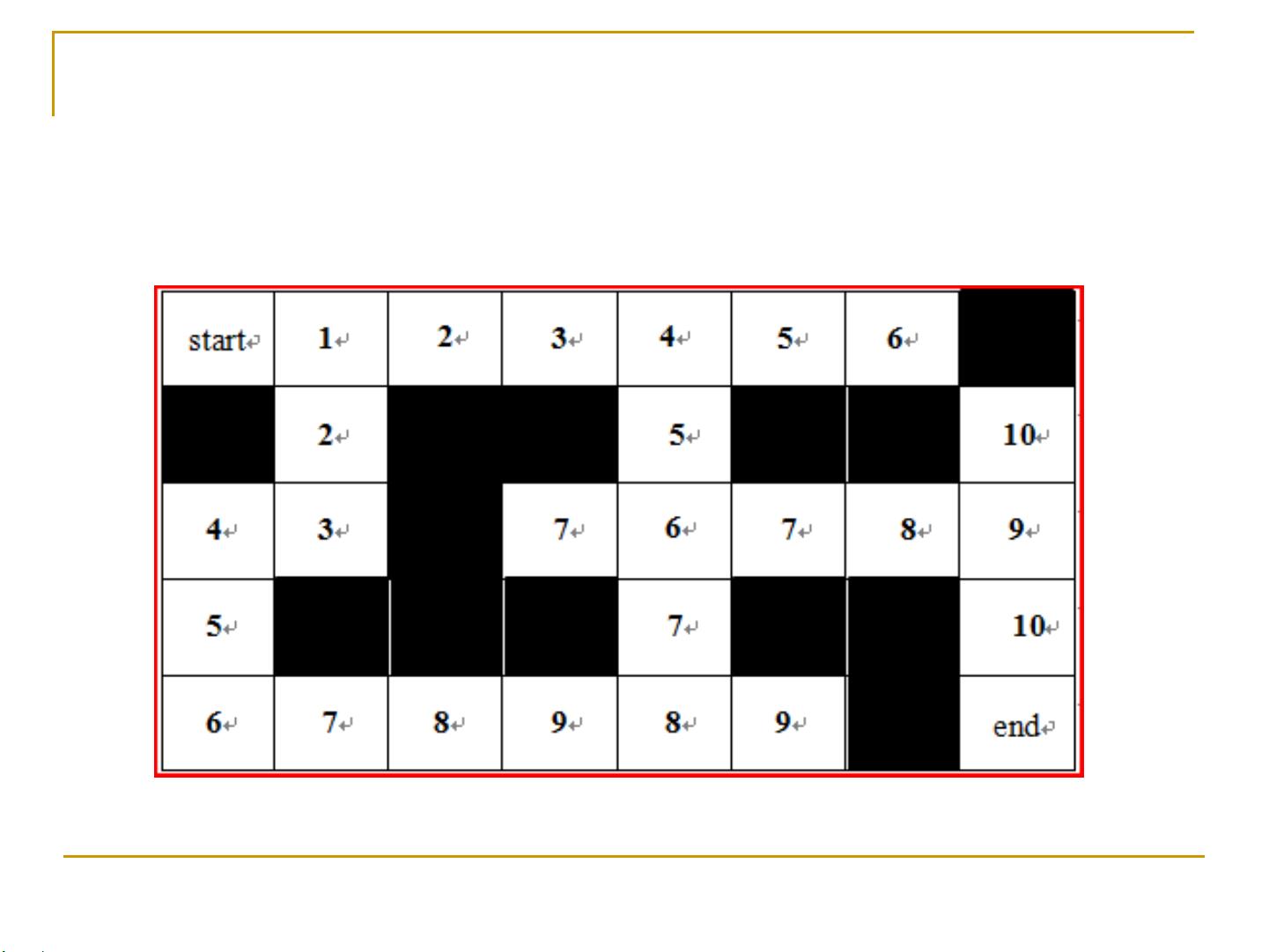
图的宽度优先(Breadth-First)遍历:邻接链表、C++
图的表示-----图的遍历
int q[ maxN ];
void BFS( int k ) {
int front,back;
q[0]=k;
front=back=0;
for(;fron<=back; fron++){
k = q[front];
visited[k] = ++search_index;
for(Adjlist *j=adj[k];j!=NULL;j=j->next){
if ( !visited[j->id] ) {
q[++back]=j->id;
visited[j->id]=++S_index;
}
}
}
}
BFS用的队列,一般全局
Front<=back,队列不空
访问k的所有相邻的节点
剩余75页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
186 浏览量
126 浏览量
144 浏览量
156 浏览量

回忆含着忧伤
- 粉丝: 11
- 资源: 123
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi高手突破(官方版).pdf
- LoadRunner中文版文档
- MATLAB 训练讲义toStudents.pdf
- 计算机操作系统(汤子瀛)习题答案
- 构建SOA 的IT 捷径
- 2002年程序员上午试卷
- 雅思王路807 必备雅思工具
- modelsim编译xilinx库的方法.doc
- 西软宽带安全审计管理软件说明书
- kjava开发手册--介绍j2me开发的一些实践
- H.264.pdf,编码解码
- ASP.NET专业项目实例开发(修订版)-课件(部分3)
- ASP.NET专业项目实例开发(修订版)-课件(部分1)
- cuda中文手册--GPU的通用编程
- 2009最新java经典面试题目(包含答案)
- java设计模式中文版
