点云向量追踪算法:自动室内平面图绘制
版权申诉
74 浏览量
更新于2024-06-28
1
收藏 358KB DOCX 举报
"自动绘制室内平面图的点云向量追踪算法是针对三维激光扫描技术获取的室内点云数据,用于精确构建室内平面图的一种方法。随着室内定位、导航和智能化管理需求的增长,室内地图的重要性日益凸显。点云数据是通过三维激光扫描技术获取的,这种技术在测绘领域取得了显著的进步,但数据处理算法仍有待优化。
点云向量追踪算法关注的是墙面点云的分割,这对平面图的精度至关重要。现有分割算法包括序惯算法和递归算法。序惯算法如点距离法、边连续法和线追踪法,递归算法如分割合并法和分段迭代拟合法。尽管这些方法在某些方面有效,但它们都存在一定的局限性,例如易受噪点影响、难以确定直线端点或处理较短直线等问题。
文献中的新方法利用了建筑物室内墙壁的空间形态特征,提出基于点云向量追踪的算法。这种方法可能更有效地抑制噪声,并能更好地识别墙壁结构,但可能在识别门和窗等细节方面有所不足。
在实际操作中,首先需要进行点云数据的预处理,这通常包括去除噪声点、平滑处理和地面点云提取等步骤。然后,通过对点云数据的分析,追踪点云向量以识别墙壁的边界。接着,根据识别出的边界绘制室内平面图。这个过程可以概括为以下步骤:
1. 数据采集:使用地面三维激光扫描仪在多个站点收集数据。
2. 数据预处理:去除异常值,平滑点云,提取地面点。
3. 墙面分割:利用向量追踪方法区分点云中的墙面。
4. 边界检测:识别墙壁的起点和终点,构建墙体边界。
5. 平面图绘制:根据识别出的边界,生成二维的室内平面图。
这种方法的优势在于能够更准确地捕捉到室内墙壁的形状,提高平面图的精度。然而,它可能需要进一步改进以处理更为复杂的情况,如包含家具或其他室内装饰的场景。通过实例验证,该算法的有效性得到了证明,为室内地图自动化绘制提供了一种可靠的技术手段。"
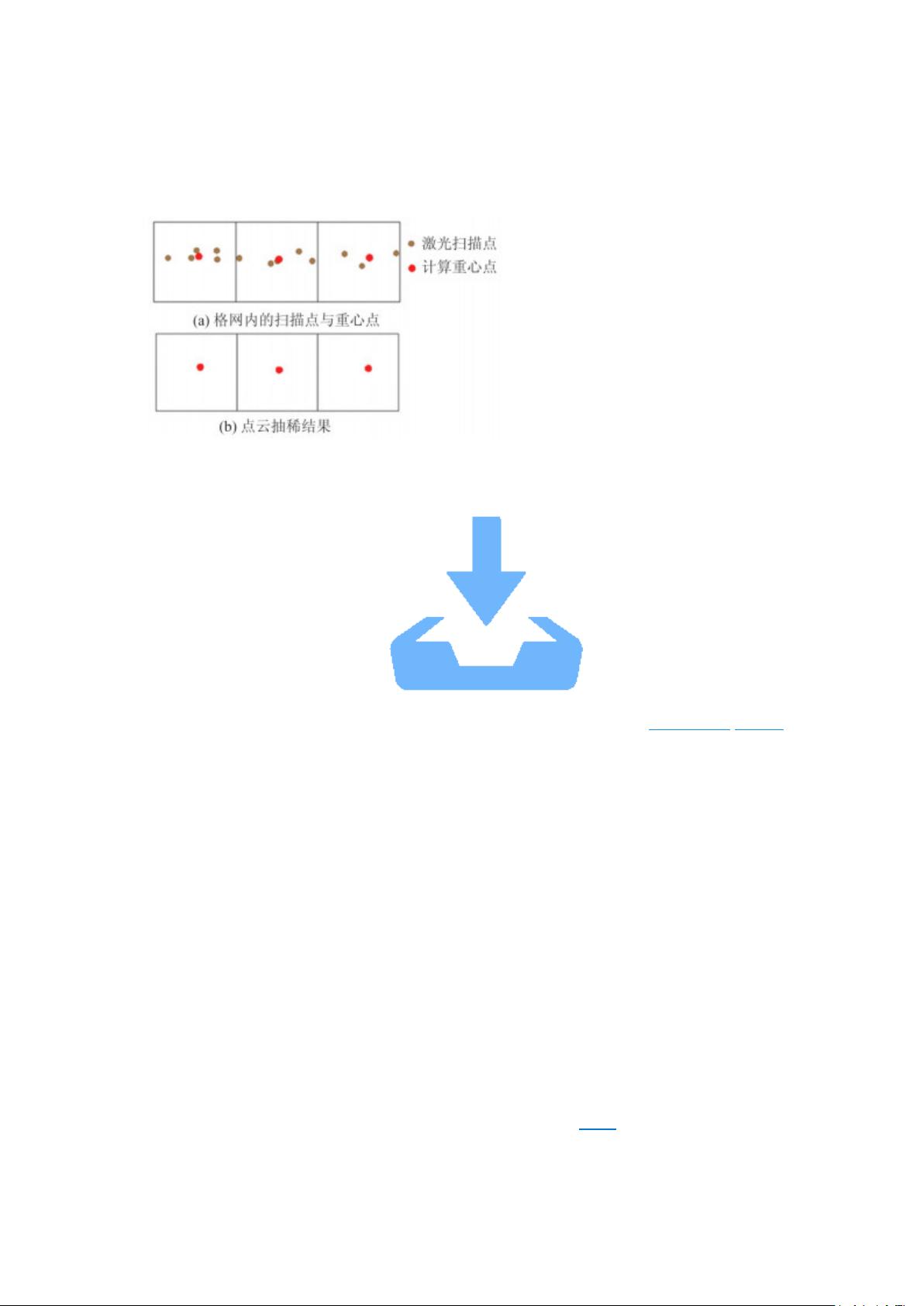
算每个网格内激光扫描点的重心点,用重心点替代网格中的扫描点,达到抽稀效果。网格
内点的重心点(X
z
, Y
z
)的计算式为:
⎧⎩⎨⎪⎪⎪⎪⎪⎪Xz=∑i=1nxi/nYz=∑i=1nyi/n{Xz=∑i=1nxi/nYz=∑i=1nyi/n
(1)
图 4 点云抽稀示意图
Figure 4. Diagram of Point Cloud Extraction
下载: 全尺寸图片 幻灯片
式中,(x
i
, y
i
)为网格内第 i 个激光扫描点的平面位置坐标;n 为网格内激光扫描点的个
数。
三维激光扫描仪获取点云时存在一定的系统误差与某些墙体表面存在的微小凹凸结
构,使得墙面的点云数据会存在一定点位误差。点位误差用 Δl 表示,根据误差传播定律可
以得到存在 m 个点的网格内重心点的误差为 Δl/m−−√Δl/m。采用空间格网重心法对点云
进行抽稀运算,不仅减少冗余数据,而且提高了点位的精度,使得点的空间分布更加均
匀,利于后续计算的进行。
1.2 基于点云向量的追踪算法
1.2.1 基于向量夹角与距离的点云追踪排序
离散无序的点云不能够显式表达室内结构以及墙壁之间的空间拓扑关系。通过分析可
知,在墙面的延伸方向上,相邻点位方位角差异较小。根据相邻点距离及点与点构成的向
量间夹角值大小对无序的点云进行追踪排序运算,具体步骤如图 5 所示。
剩余15页未读,继续阅读
2021-02-08 上传
2022-06-26 上传
2022-07-08 上传
2023-04-05 上传
2022-01-03 上传
2021-05-25 上传
2019-05-23 上传

罗伯特之技术屋
- 粉丝: 4406
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
