非线性控制下的扰动观测器设计与仿真
非线性控制5——扰动观测器是一篇关于在非线性控制系统中使用的关键工具的技术文献。扰动观测器的基本原理是通过将实际模型与理想模型之间的偏差视为等效干扰,然后在控制器中引入补偿以抵消这些干扰。其核心思想是将外部干扰和模型不确定性转化为控制输入,从而实现干扰的精确估计和补偿。
该方法的核心挑战包括如何处理模型的不确定性(如相对阶非零的传递函数)、对象的精确数学模型难以获取以及测量噪声的影响。为解决这些问题,作者提出在扰动观测器之后串联低通滤波器,利用理想模型的逆来近似实际系统的动态。通过梅森公式,设计者可以根据系统的频率特性调整滤波器的带宽,以达到鲁棒稳定性与干扰抑制能力的平衡。
在低频段,设计要求滤波器带宽足够宽,以确保对低频干扰的有效补偿,增强系统的鲁棒性,同时可能对低频测量噪声较为敏感,需要采取措施减少噪声。而在高频段,滤波器带宽变窄,旨在有效地滤除高频噪声,但对对象参数的变化和外部扰动的抑制作用有限。
文章还提供了仿真实例,如DOPBS(扰动观测器与反步法)的主程序,用于在仿真环境中展示扰动观测器的实际应用。这个程序展示了如何将理论设计转化为实际控制策略,并通过实际案例验证其效果。
总结来说,非线性控制5——扰动观测器是针对非线性系统设计的一种关键工具,它通过巧妙地设计滤波器和补偿机制,有效应对系统中的不确定性和噪声,是提高系统稳定性和性能的重要手段。
一、基本原理一、基本原理
扰动观测器的基本思想是将外部干扰外部干扰及模型参数变化模型参数变化造成的实际模型与理想模型输出的差异统统等效为
控制输入,即观测出等效干扰,在控制中引入等量的补偿,实现对干扰完全抑制。干扰观测器的基本思
想如图1所示。
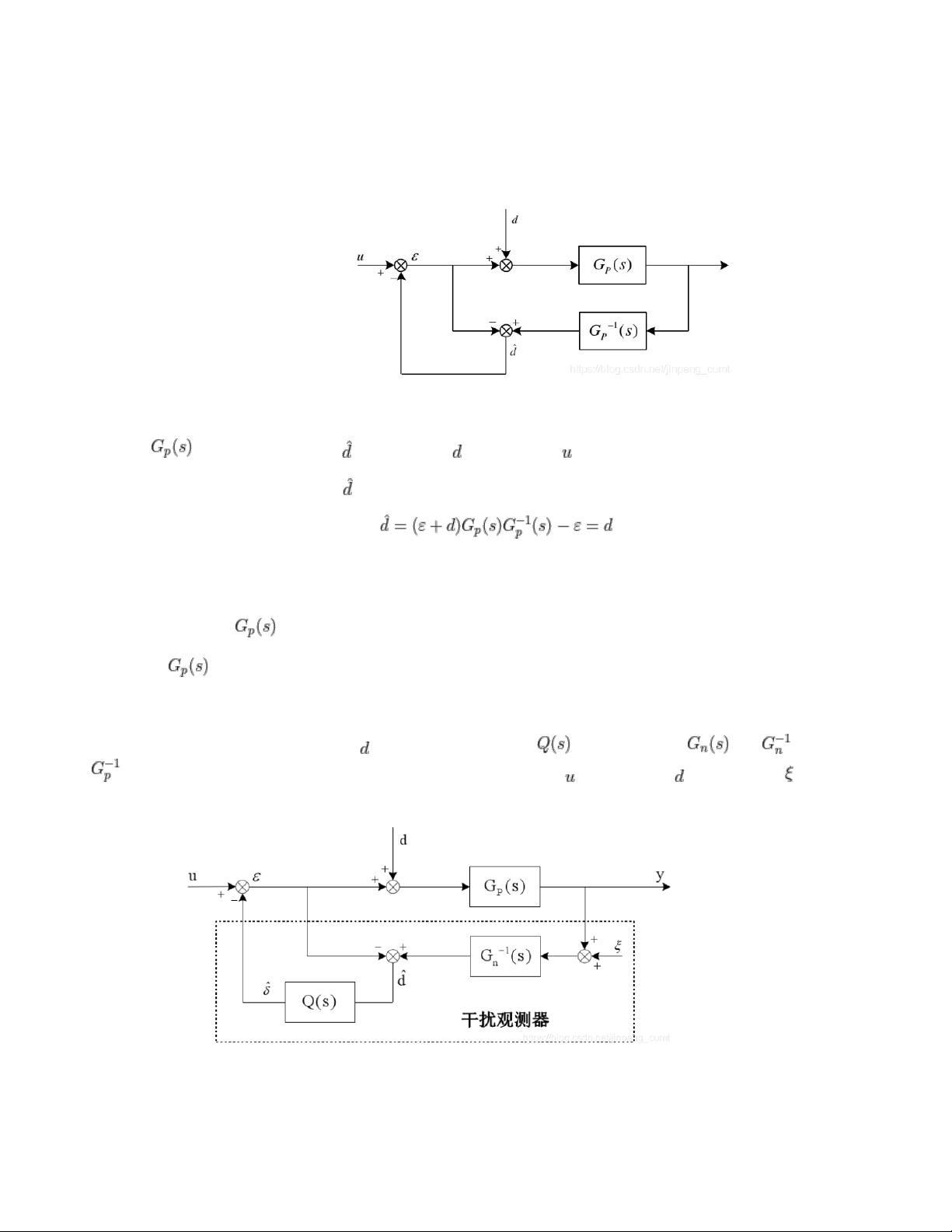
图1 干扰观测器的基本思想
图2中的 为对象的传递函数, 为等效干扰, 为观测干扰, 为控制输入。
由图可知,求得等效干扰的估计值 为:
(1)
式(1)说明,用上述方法可以实现对干扰的准确估计和补偿。图1描述了干扰观测器的基本思想,但对
于实际的物理系统,其实现存在如下问题:
(1)通常情况下, 的相对阶不为0,其逆物理上不可实现;
(2)对象 的精确数学模型无法得到;
(3)考虑测量噪声的影响,上述方法的控制性能将下降。
解决上述问题的一个自然的想法是在 的后面串入低通滤波器 ,并用理想模型 的逆 来替代
,得到如图2所示的框图,其中虚线框内部分为干扰观测器, 为输入信号, 为等效干扰, 为测量
噪声。
图2 干扰观测器原理框图
根据梅森公式有
下载后可阅读完整内容,剩余5页未读,立即下载
2014-01-20 上传
2021-09-30 上传
2021-09-25 上传
2014-06-22 上传
2019-08-16 上传
2022-05-07 上传
2021-08-27 上传

助力毕业
- 粉丝: 2191
- 资源: 5186
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
