ADAMS与MATLAB联合仿真:四足机器人运动学与步态控制研究
版权申诉
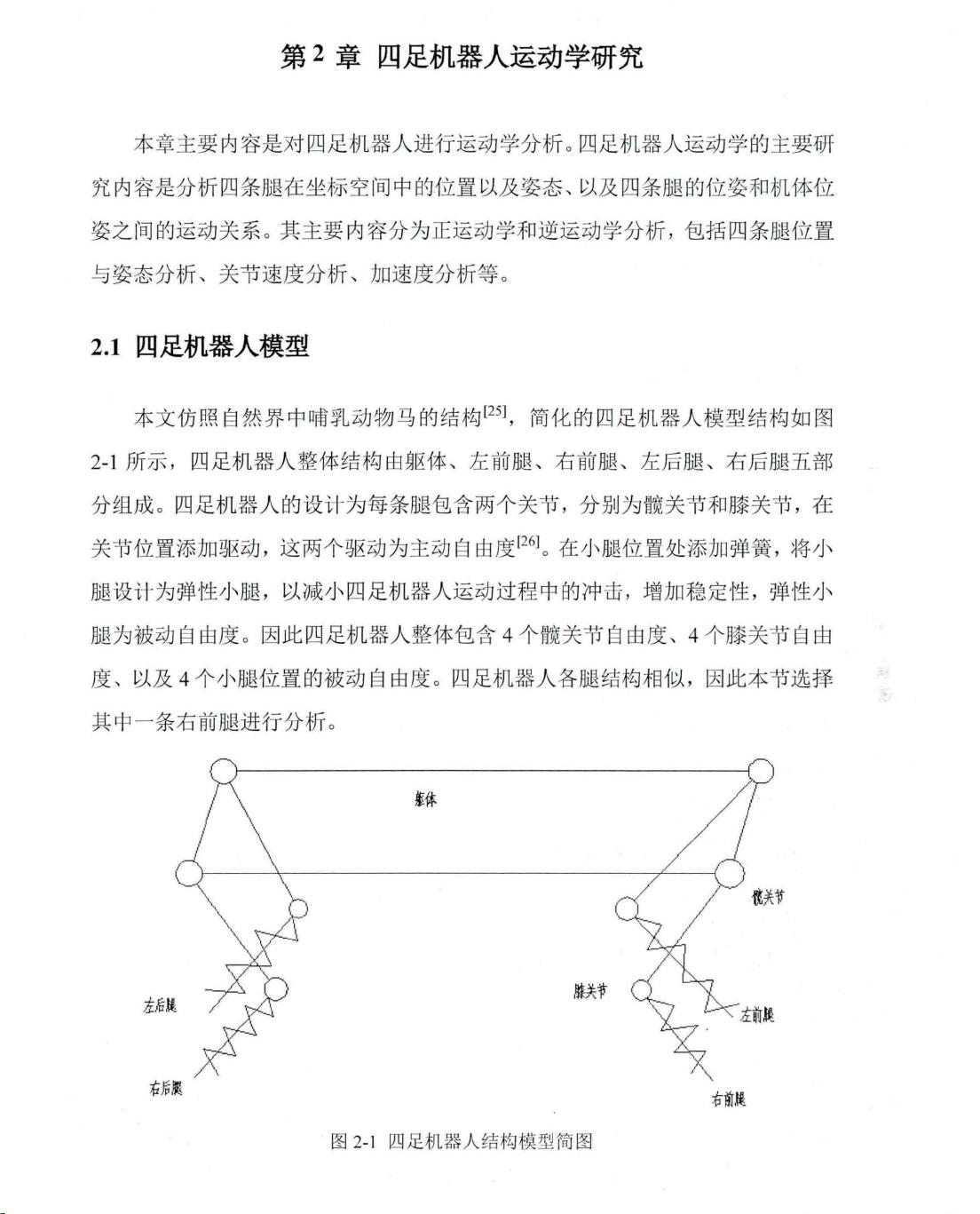
"基于ADAMS和MATLAB的四足机器人联合仿真研究主要针对的是在复杂环境中表现出色的足式机器人,尤其是四足机器人。随着轮式机器人在某些场景下的局限性,四足机器人因其高机动性和承载能力在抗震救灾和军事任务中展现出独特优势。本文的研究背景和意义在于通过结构简化设计和运动学分析,降低研发成本和时间消耗。
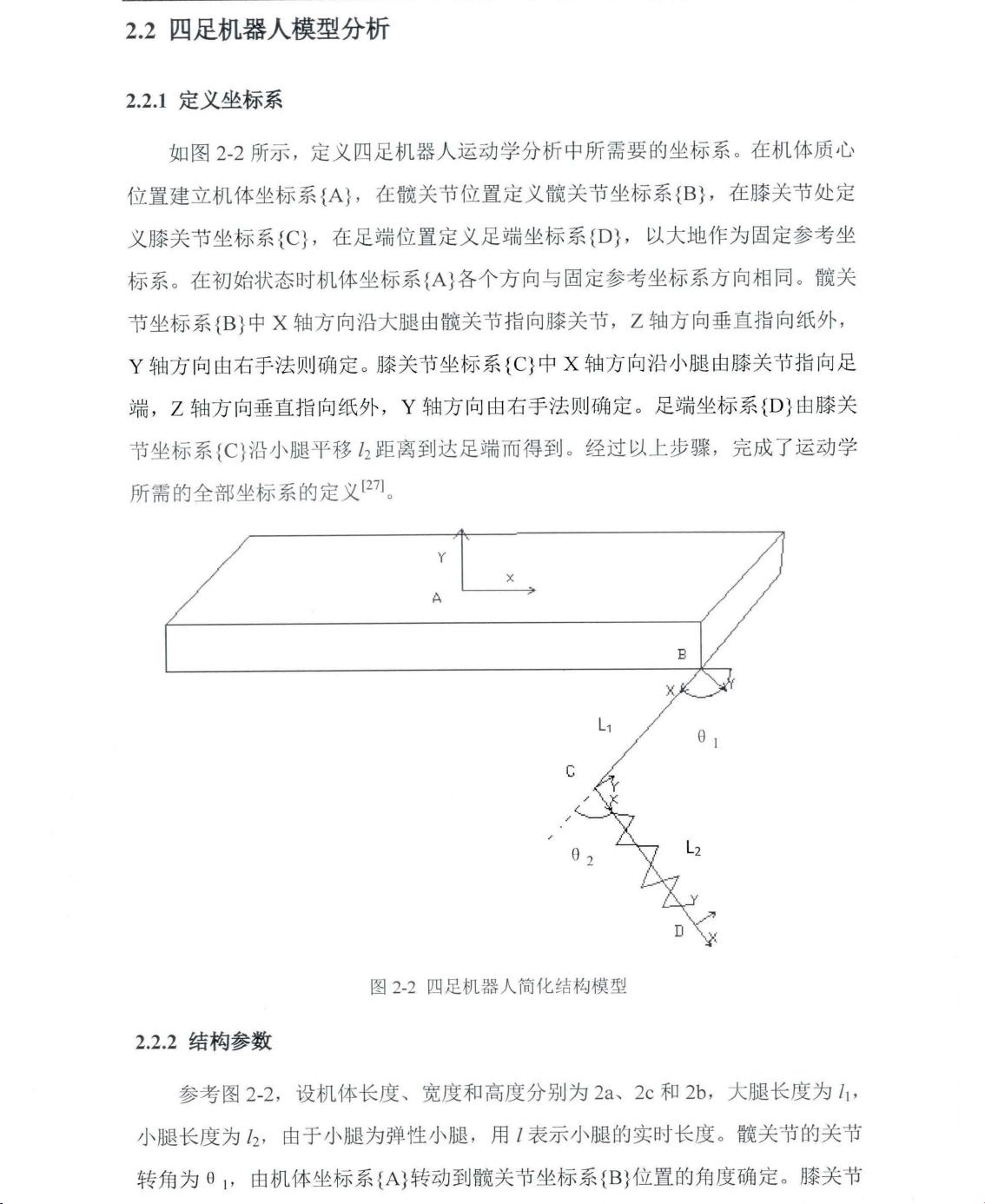
首先,章节一介绍了课题的研究背景,概述了国内外四足机器人领域的研究现状,特别强调了四足机器人在复杂环境中的优势。文章指出,为了有效进行研究,作者采用了ADAMS(一种多体动力学仿真软件)和MATLAB(一种强大的数值计算和可视化工具)进行联合仿真。四足机器人的模型构建在这些工具上展开,包括定义了坐标系、结构参数,以及对右前腿的运动学分析,如正运动学、逆运动学、速度和加速度的计算。
接下来的章节,着重于四足机器人的步态仿真。通过虚拟样机技术,如ADAMS中的三维模型构建和MATLAB中的参数设置,完成了机器人步态的联合仿真。这部分内容涉及虚拟样机的设置、约束和驱动的添加,以及状态变量的建立。仿真过程中,控制系统的设计是关键,包括关节驱动曲线、位移和驱动力矩的仿真结果,以及接触力的设定。通过合理的仿真参数调节,确保了关节角度测试和运行周期的调试。
最后,章节分别讨论了步态联合仿真中的虚拟样机设置、控制系统设置和仿真结果分析,包括关节角度变化、位移曲线、驱动力矩和接触力等参数的变化。作者强调了周期和摆动角度的调整,并在总结部分回顾了整个研究过程,展望了未来可能的应用和发展方向。
该研究利用ADAMS和MATLAB的强大功能,深入探讨了四足机器人的运动学模型、步态仿真和控制系统设计,为四足机器人的实际应用提供了理论支持和模拟验证。"
山 东大 学 硕 士 学 位论文
第 二 , 在 设 计 控 制 系 统 时 , 采 用 了 软件 。 在 建 立控制
系 统 时 , 由 于 各个 关节 需 要 独立 的 驱动 , 需 要 为 每 个 关 节 驱动 建立 一 个
作 为 关 节 驱动 。 各个 关 节 的 的 编 写 与 调 试 , 是 控 制 系 统 设 计难 点 。
第 三 , 由 于 采 用 和 联合仿 真 , 两 个软件 之 间 要 实现信 息
相 互 交 流 , 如 何保证 二 者 之 间 交 流通畅 , 避 免 发生 不 兼 容 问 题 , 也 是 一个难 点 。
论文主要研究 内 容
本论文参 照 自 然 界 中 马 的 运动 形 式 , 对 四 足机器人进行 建模 , 结 合虚拟 样机
技术 软件 与 控 制 系 统 软件 对 四 足 机 器人进 行 步 态规划 、 运
动 学 和 动 力 学 分析 , 使 四 足机器人模 型 良 好运行 。 本 论 文 的 主 要 内 容如 下 :
第 一 章 总 体 阐 述 了 论 文 的 背 景 和 研 究 意 义 。 分 析 国 内 外 研 究 现状 , 探讨 了 本
文研 宄 主 要 难 点 。
第 二 章 利 用 杆
件
法建立 四 足机器 人坐标 系 并对 四 足机器 人 进 行 运动 学
和 逆 运 动 学分 析 。 利 用 雅 可 比 矩 阵 分 析 了 四 足机 器 人 关 节速度 以 及 加 速度 。
第 三 章 是 本 论文 主 体部 分 。 在 中 建 立 四 足 机 器人 三 维 模 型 , 之后 将 三
维模 型 导 入 至虚 拟样机 软件 中 , 在 中 建立 虚拟样机模 型 , 并
在 软件 中 设计控 制 系 统 , 实 现 了 步 态 仿 真 。 并对 仿 真
结 果 进行 分 析 。
第 四 章 主 要 在 中
进
行 步态 的 控 制 系 统 设计 , 实
现 步 态 的 仿 真 。 分析 仿 真 结 果 , 调 整 各 关 节 的 摆 动 角 度 和 运 动 周 期 。
第 五 章 为 全 文 总 结 , 并 对 未 来 研 究 进 行 了 展 望 。
剩余79页未读,继续阅读
131 浏览量
2390 浏览量
141 浏览量
145 浏览量
189 浏览量
192 浏览量
115 浏览量
136 浏览量
171 浏览量

「已注销」
- 粉丝: 849
 我的内容管理
展开
我的内容管理
展开







最新资源
- jQuery软键盘插件jquery.keypad.package-1.2.0实用教程
- 探索HTML领域的a3a技术应用
- 冬季主题New Tab扩展:个性化壁纸与游戏
- ShearLab-PPFT-1.0:图像去噪实战与学习资源分享
- Linux平台socket聊天工具源码及Makefile分析
- 使用JavaScript打造简单优雅的sparklines火花线图表
- 探索个人摄影艺术与技术:sathvikphotography.github.io
- 两人对战中国象棋在线游戏源码解析
- 丹·史蒂文斯Chrome壁纸插件:新标签页个性化
- 微信裂变红包源码解压与配置指南
- 局域网内计算机远程唤醒解决方案
- 非人类html家庭作业的PHP存储库解析
- GBK与UTF-8编码互转实用工具
- 用Node.js实现的最喜欢的专辑CRUD应用教程
- 深入解析DOM遍历技术,实现XML文件节点的全面管理
- 在VC6.0下编译SQLite3.lib类库的详细步骤
