三菱PLC教程:霓虹灯闪烁控制与移位指令应用
版权申诉
73 浏览量
更新于2024-06-26
收藏 1.27MB PPT 举报
"三菱PLC课件PPT项目4--任务3.ppt"
本文将深入探讨三菱PLC在实现霓虹灯闪烁控制中的应用,重点介绍使用PLC功能指令,特别是循环移位指令来达到控制目的。这个任务是《PLC应用技术》项目的一部分,旨在通过实践增强对PLC编程的理解和技能。
任务3的目标是设计一个系统,控制6盏霓虹灯L0到L5以特定模式闪烁。这些灯需按照正序每隔1秒依次点亮,然后所有灯全亮保持5秒,如此循环。实现这一功能可以采用多种方法,其中包括使用乘法和除法指令,但这里我们关注的是利用移位指令,如循环右移位(ROR)和循环左移位(ROL)指令。
循环移位指令是PLC编程中的重要工具,它们允许数据在位元件中按指定方向循环移动。对于三菱PLC,ROR指令将数据向右移动,而ROL指令则向左移动。需要注意的是,当目标操作数为位组合元件时,只能使用K4或K8作为有效移位次数。此外,移位指令通常与脉冲执行或边沿执行条件结合使用。
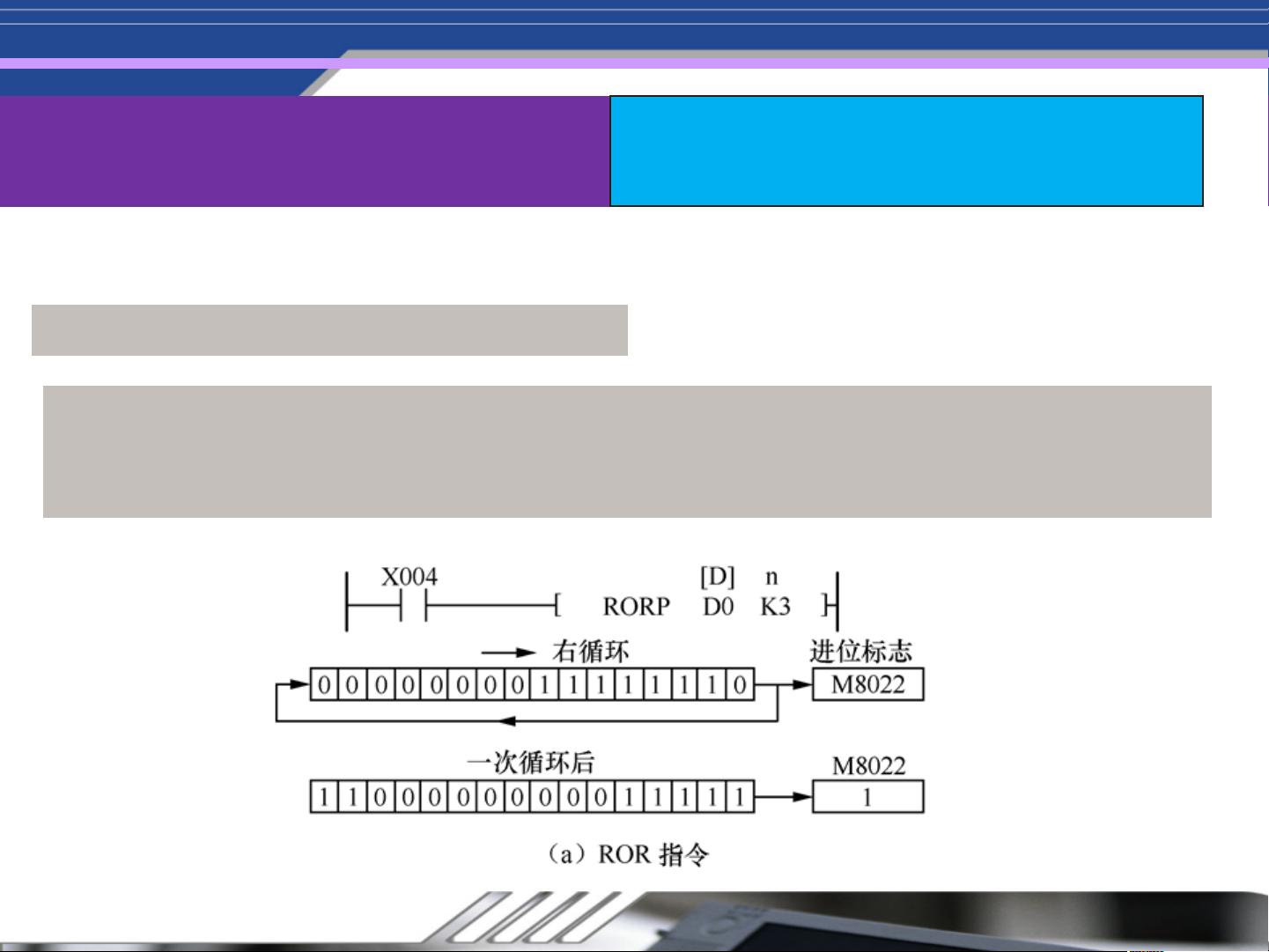
1. 循环右移位指令(ROR):该指令将数据的最低位移出并存储在进位标识M8022中,其余位向右移动。例如,如果初始数据为K4Y0,执行ROR指令后,Y0至Y3的位数据会依次右移,而原来的最低位会被存入M8022。
2. 循环左移位指令(ROL):与ROR相反,ROL指令将数据的最高位移出并存入M8022,其余位向左移动。这使得数据的顺序在位元件中逆向移动。
为了演示如何使用这些指令,我们考虑一个包含14个彩灯的案例,它们连接在Y0到Y15上。需求是让灯组以0.1秒的频率正序和反序交替点亮。为此,可以设置两个输入按钮,X0作为启动,X1作为停止。当启动按钮被按下时,初始值K1赋予K4Y0,随后每0.1秒执行一次左移位,形成正序。当灯组移动到最后一个灯(Y15)并继续移位至Y16时,设置标志M1,停止正序移位,同时复位M2以启动反序右移位。这样,Y16仅作为信息转换的桥梁,灯组接下来以0.1秒的间隔进行反序点亮。
这个案例展示了移位指令在PLC程序设计中的灵活性和实用性,尤其适用于需要连续、循环控制的场景。通过掌握这类指令,工程师能够更高效地设计出满足各种控制需求的PLC程序。
《PLC应用技术 》
项目4 PLC功能指令应用
任务3 霓虹灯闪烁控制
二、相关知识----移位指令
循环右移指令ROR使[D]中各位数据向右循环移n位,最后从最低
位移出的数据存于进位标识M8022中。
1、循环移位指令---ROR指令
剩余23页未读,继续阅读
2023-03-31 上传
2022-06-09 上传
2022-06-09 上传
2022-06-09 上传
2021-10-02 上传
2022-11-24 上传
2021-10-02 上传

智慧安全方案
- 粉丝: 3845
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- DemoJenkins
- 实现按钮颜色的各种渐变效果
- FtpFile:局域网文件传输系统
- 泰州别墅装修图
- win7 安装.net framework 4.5.2报错:“根据当前系统时钟或签名文件中的时间戳验证时要求的证书不在有效期内
- AirBnB_clone
- 3D旋转特效
- weed-client:Seaweed文件系统的Java客户端
- 随机信号研究型习题3(通信接收机输出概率特性实验研究)
- The CFML Community Platform-开源
- 加载网页进度条
- 中式连锁快餐公司创业经营案例汇编
- SymbolFactory_v3.0.rar
- dhcpdump2-开源
- 旅行
- OnlineBook模板.zip
