STC89C52单片机驱动的运水机器人设计与实现
版权申诉
28 浏览量
更新于2024-06-23
收藏 748KB DOC 举报
"基于单片机的运水机器人设计文档"
这篇文档详细介绍了基于单片机的运水机器人设计过程,主要包括设计任务、方案设计、总体设计、测试结果、创新点以及总结。以下是对这些部分的详细解读:
1. 设计任务与要求:
- 基本设计任务是构建一个能携带水的机器人,使用直流电机驱动,机器人需能在A-C间自动运水。当红外光电开关检测到黑色边线时,机器人应能停止。
- 控制设计任务是确保机器人在A-C间准确行驶特定距离(2000mm)。通过红外光电开关判断位置,并结合软件控制行驶路径。
- 软件设计任务包括处理红外开关的信号,控制电机的启停与方向,以及管理计时模块。
2. 方案设计与论证:
- 电源方案未具体提及,通常会考虑稳定、高效且符合机器人运行需求的电源配置。
- 驱动电路方案可能涉及电机控制器,用于接收单片机指令并驱动电机运转。
- 距离控制方案使用红外光电开关,通过检测黑色边线来实现位置感知。
3. 总体设计:
- 系统硬件电路设计包括探测传感器模块(红外光电开关)和电机驱动模块。传感器用于检测边界,电机驱动模块则根据指令驱动机器人移动。
- 系统软件设计涉及到计时分析和计算,软件流程图设计,以及按键识别和时间显示模块的计数周期控制。
4. 测试结果及结果分析:
- 测试包括使用特定的仪器和工具,执行预备工作和正式测试,以验证机器人是否达到所有技术指标。
- 测试结果分析将评估机器人的性能,如定位精度、运水效率等。
5. 创新点:
- 添加了计时模块,增强了实用性,可能用于优化运水周期或提高运行效率。
- 强调了设计的实用性,意味着机器人能够适应实际操作环境。
6. 总结与心得:
- 可能包含了设计过程中遇到的问题、解决方法、改进措施以及对未来的思考。
7. 附件提供了参考程序、总原理图和元器件清单,是实施设计的重要参考资料。
关键词涉及到运水、电机驱动和探测传感器,这些都是设计的核心组成部分。整个设计旨在利用单片机控制技术,实现自动化运水任务,同时通过软件升级提高了系统的实用性和精确度。
运水机器人
Ⅰ、设计任务与要求
本任务为 F 题:运水机器人。设计任务具体内容如下:
C
B
A
2000700
700
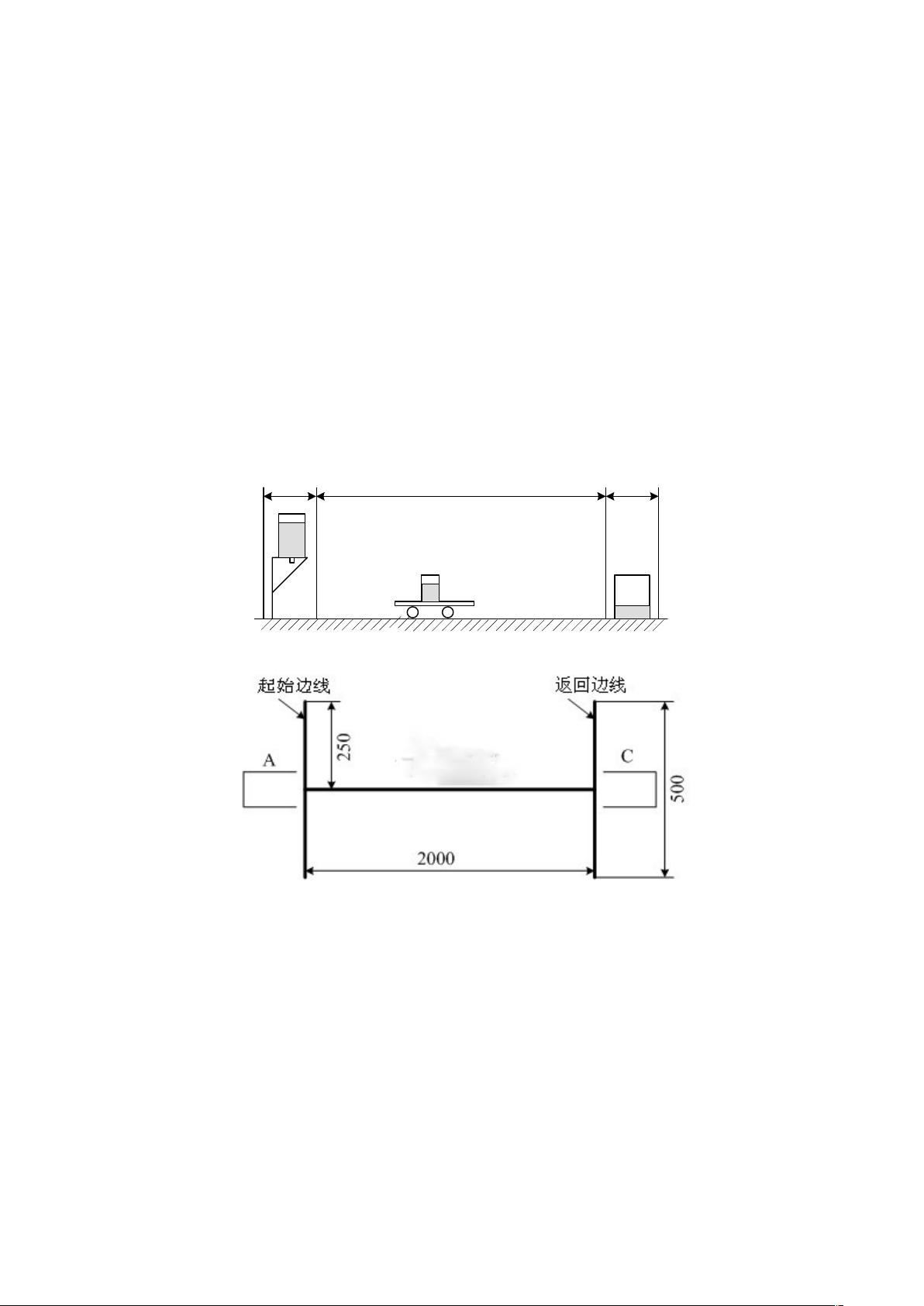
图 1-1 参考图
图 1-2 路线图
1.1 基本设计任务
依据命题题意,本设计采用直流电机带轮式小车带实现机器人的运动。机器
人上面要装有盛水容器,以便完成在 A-C 之间的运水任务。当红外光电开关探
测到黑色边线的时候停止小车运动,小车停在 A 区是通过手动控制小车重新运动,
小车停在 C 区通过软件延时控制小车重新运动,这样达到循环运动,进而完成运
水任务。
1.2 控制设计任务
剩余14页未读,继续阅读
105 浏览量
2023-09-11 上传
2024-01-25 上传
2023-06-07 上传
2023-07-06 上传
2023-07-11 上传
2023-07-11 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







