FANUC机器人Profinet IO控制器配置指南
版权申诉
本文档详细介绍了如何在FANUC机器人上设置MOLEXProfinet板卡IO控制器与倍福网关(Trumpf)之间的通信。首先,确保安装了FANUC机器人R834的双通道Profinet软件选项和电脑上的PFN-CT Profinet配置工具。网关的GSD文件GSDML-V2.2-beckhoff-EL6631-20100125.xml也需要准备。
设置过程分为几个关键步骤:
1. 在Trumpf网关侧,设置其IP地址、设备名称和所需的输入/输出字节数。确保网关与机器人处于同一网络段,否则可能遇到通信问题。如果不存在网关,可以暂时设置为0.0.0.0,后续再调整。
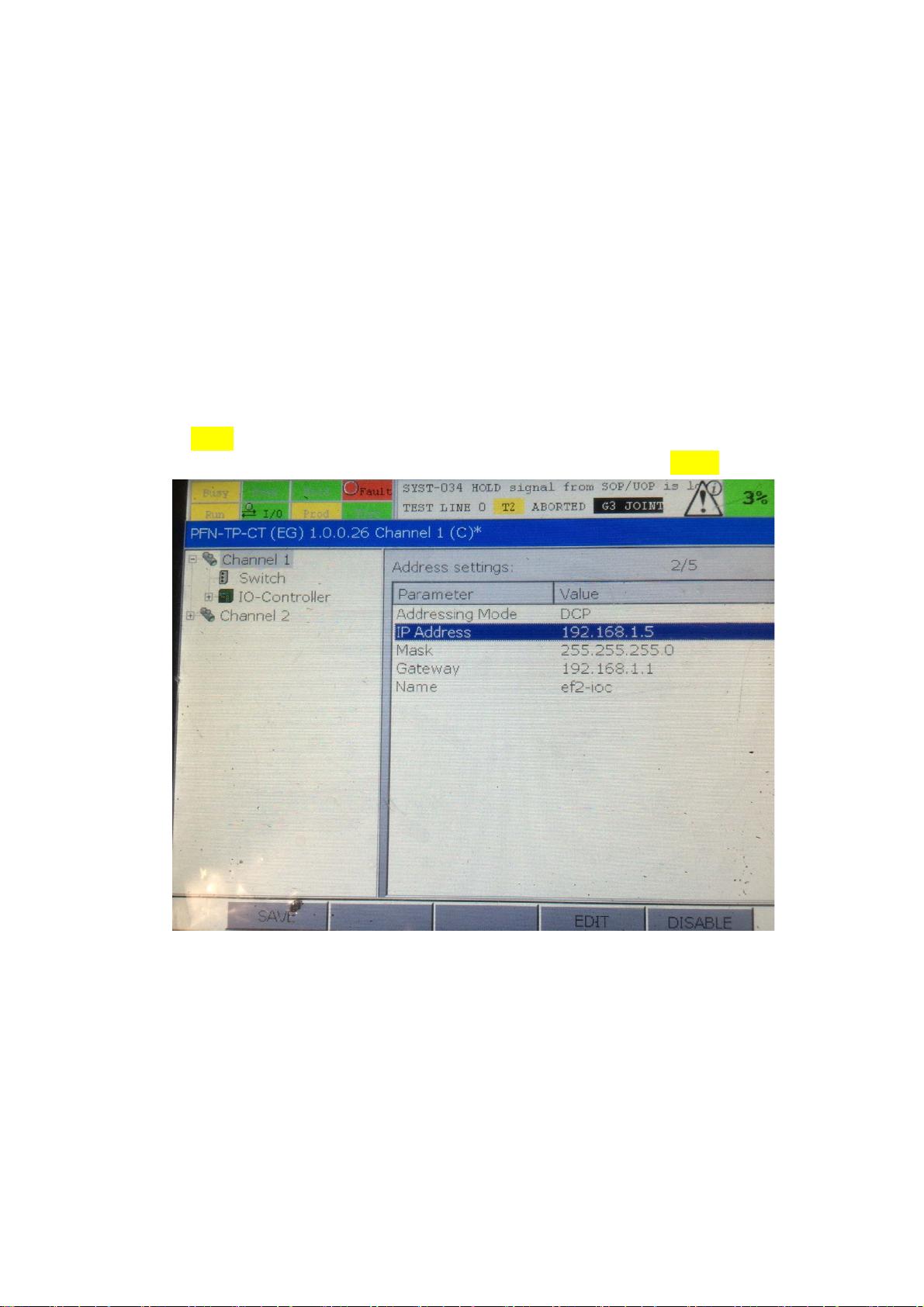
2. 在机器人IO菜单中,进入Profinet设置工具,区分Channel1(IO控制器,对应板卡下侧接口)和Channel2(IO设备,对应板卡上侧接口)。编辑Channel1的IP地址和子网掩码,确保网络连通性。
3. 检查并修改机器人Profinet控制器的IP地址,确保能够ping通机器人,排除网络连接问题。
4. 使用PFN-CT软件,进行TargetConfiguration设置,选择与机器人相连的网卡,并输入Profinet控制器的IP地址。
5. 在DeviceLibrary中通过向导添加GSD文件,将设备添加到IO目录中,便于设备组态管理。
6. 设备上电并连接后,进行网络检测。在NetworkDetection选项卡中,执行ReadNetworkConfiguration来读取设备配置,设备会自动出现在列表中。OnlineAction功能类似于Step7中的EditEthernetNode,用于设备名称、IP地址的查看、修改或重置。
7. 将搜索到的设备拖动到ProfinetChannel中,完成设备与控制器的连接。
8. 对于输入/输出设备的配置,可以通过手动添加或扫描设备组态进行。确保设备已正确连接并显示在网络中。
通过以上步骤,用户可以成功地配置FANUC机器人与倍福网关之间的Profinet IO通信,实现设备间的数据交换和控制。这在自动化生产线上具有重要意义,提高了系统的集成性和效率。
此文是 FANUC 机器人做 ProfinetIO 控制器(MOLEX 板卡)与通快激光器(倍福网关)的通
讯步骤
前提:
机器人Dual Channel Profinet Software Option (R834)已安装
电脑PFN-CT PROFINET Configuration Tool已安装
网关的GSD文件GSDML-V2.2-beckhoff-EL6631-20100125.xml已准备
1. 首先在Trumpf一侧设置好网关的IP地址,Profinet设备名称,以及通讯需要
的输入/输出字节数;
2. 在机器人IO菜单中找到Profinet设置工具,可以看到两个Channel,Channel 1
是IO控制器,对应Profinet板卡下侧的两个接口;Channel 2是IO设备,对应
板卡上侧的两个接口。
按EDIT设置Channel 1的IP地址和子网掩码,注意要和网关在一个网段,否
则保存时会报错;若无网关,可将其设置为0.0.0.0,修改后按SAVE保存。
3. 修改计算器 IP 地址,使之与机器人 Profinet 控制器在同一网段;此时若能 ping 通机器
人,才可以继续下面的步骤,否则请检查机器人 IP 设置,网口是否插错,网线是否良
好等;
下载后可阅读完整内容,剩余9页未读,立即下载
2020-10-19 上传
111 浏览量
124 浏览量
919 浏览量
2021-12-25 上传
2021-09-24 上传

RB_TANG
- 粉丝: 9
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- 可爱蝴蝶图标下载
- containment-unit:使用 Docker 支持 Postgres 测试
- CartPoleDesign
- doophp(php框架) v1.4.1
- CompSoc-Highlight:BICs 2020大奖的重点网站
- 小丑鱼图标下载
- 虚拟演示
- 初级java笔试题-learn-to-code:学习编码
- ModelMaker Code Explorer 15.0.13.2378 (Delphi 代码增强工具)
- 章鱼卡通图标下载
- putty-64位安装包.zip
- 智能家居行业小程序源码.zip
- CSC-2110-Project
- 22_Bit_CPU_MIPS
- XCSandboxViewer:App sandbox file manager of iOS device ! iOS真机沙盒文件管理器 !
- Công Cụ Đặt Hàng Của Đặt Hàng Siêu Tốc 247-crx插件
