模糊空间划分下的频繁轨迹模式挖掘新方法
178 浏览量
更新于2024-08-27
收藏 1.43MB PDF 举报
在信息技术领域,频繁轨迹模式挖掘(Frequent Trajectory Pattern Mining)是一项重要的时空数据分析任务,它在交通管理、城市规划、商业分析等领域具有广泛的应用。然而,由于空间轨迹数据的模糊性和不确定性,这项任务面临着显著的挑战。传统的数据挖掘方法往往依赖于清晰的空间分区(Crisp Space Partition),例如通过经典的 PrefixSpan 算法或 GSP (Generalized Spatial Pattern) 算法来处理精确的位置信息,以此降低空间近似带来的问题。
尽管这些方法有助于减少误差,但它们存在一个固有的缺陷:当空间上相邻的轨迹位置被分配到不同的分区时,即所谓的“尖锐边界”问题。这意味着即使两个轨迹在地理位置上非常接近,它们可能因为划分标准而被视为不同模式,这显然与我们对频繁模式的定义相违背,即相似的轨迹应该被视为同一模式。
为解决这个问题,本文提出了一种基于模糊空间分区(Vague Space Partition)的频繁轨迹模式挖掘方法。模糊空间分区允许对于轨迹位置的不确定性进行更自然的处理,通过引入模糊度和权重机制,能够将邻近轨迹归为同一模式的可能性增大。这种方法旨在减少因空间划分导致的误分,提高模式发现的准确性。
Liang Wang等人在他们的研究中,针对这一挑战,设计了一种新颖的方法,该方法结合了前向生长(PrefixSpan)算法或者GSP算法的特点,同时考虑了轨迹位置的模糊性。他们首先对轨迹数据集进行模糊划分,然后采用一种自适应的阈值策略来确定轨迹之间的相似性,以此来识别频繁模式。这种方法能够在保持效率的同时,减少空间边界带来的影响,从而挖掘出更加符合实际需求的频繁轨迹模式。
这篇论文探讨了如何利用模糊空间分区技术改进频繁轨迹模式挖掘,以克服传统清晰空间分区方法中的边界问题。通过这种创新方法,研究人员可以挖掘出更加准确和全面的轨迹模式,这对于优化决策支持和提升数据挖掘结果的实用性具有重要意义。未来的研究可以进一步探索如何优化模糊空间划分策略,以适应更大规模和复杂性的轨迹数据集,以及如何将这种方法与其他高级数据分析技术相结合,以发掘更多有价值的信息。
By utilizing the gridding spatial partition approach, the contin-
uous spatial domain can be simply represented by the discrete grid
cells. Accordingly, the problem of trajectory pattern mining can be
reduced into a sequence pattern mining problem, so that many
conventional sequence pattern mining techniques can be applied
to this problem.
Although the grid-based approach can solve the spatial approx-
imation concern to a certain degree as mentioned above, it causes
the sharp boundary problem. That is, when some approximate tra-
jectory locations are close to the boundary of predetermined grid
cells, they will be most likely assigned to different cells by the
strict boundary constraints. Therefore, some potential meaningful
patterns will not be discovered due to this issue. In other words,
the approximate trajectory locations may span more than one grid
cell using the crisp gridding spatial partition approach. Considering
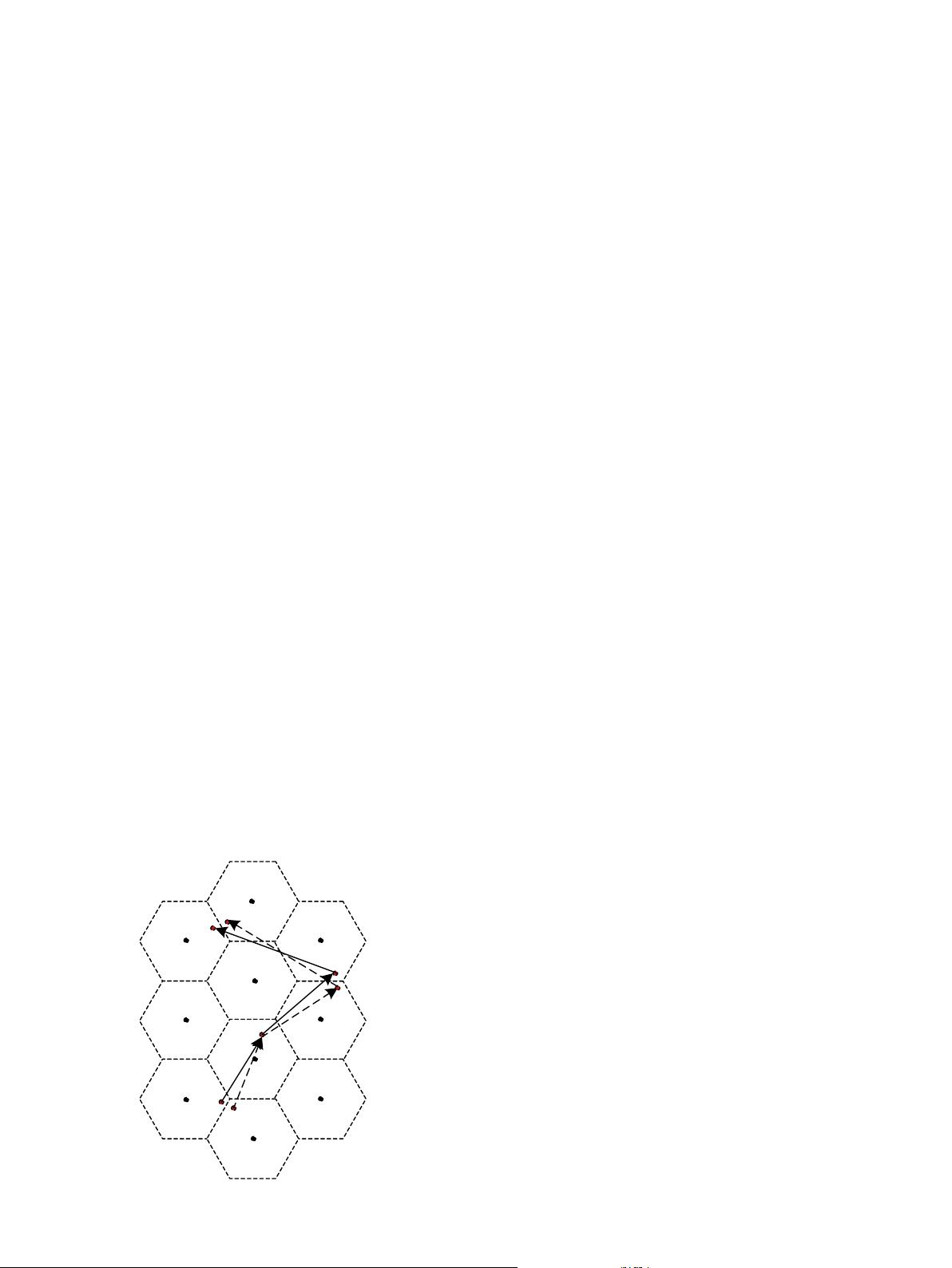
a scenario shown in Fig. 1, two similar and close trajectory in-
stances, Tr
1
={p
1
, p
2
, p
3
, p
4
} and Tr
2
¼fp
0
1
; p
0
2
; p
0
3
; p
0
4
g, are regarded
as two different moving behaviors s
7
? s
8
? s
3
? s
1
and
s
10
? s
8
? s
6
? s
2
in the crisp space partition way. However, it is
obvious that these two trajectories share the same moving pattern.
This example clearly suggests that the crisp grid space partition
method is sensitive to spatial noise. If mobile objects with similar
trajectory pattern do not exactly follow the same trajectories, the
implicit pattern cannot be detected.
However, in practice, we do not expect a mobile object to visit
exactly the same location at every time instant during each time
period. In addition, due to the limited energy supply of sensor de-
vice and location precision errors, the trajectory readings from
these devices always carry uncertain information. In that case, the
sharp boundary problem will deteriorate drastically with increas-
ing noise. Actually, the regular crisp space partition method can
be seen as a hard partition way with strict boundary constraints.
From Fig. 1, we can learn that the hard partition way is very likely
to cause the sharp boundary problem. Therefore, we consider divid-
ing the spatial plane via a flexible partition way to approximate
close trajectory locations and tackle the sharp boundary problem.
3.2. Problem definition
Definition 1. The time interval in a moving trajectory between any
two trajectory locations hx
i
, y
i
, t
i
i and hx
j
, y
j
, t
j
i is defined as
D
t = t
j
t
i
, where t
j
> t
i
. For example, the consecutive time intervals
of a moving trajectory Tr
2
={h p
1
,2i, hp
3
,5i, hp
7
,10i } are 3 and 5
respectively, and the transformed form of the moving trajectory
with time intervals is represented as p
1
!
3
p
3
!
5
P
7
.
Definition 2. A trajectory pattern in this work is defined as r
i
!
D
t
r
j
,
where r
i
and r
j
denote the spatial grid cell labels, and
D
t is a time
interval between these two cells. A pattern with k-length is called
k-pattern. Actually, a k-pattern is comprised of k grid cells and
(k 1) time intervals.
Definition 3. The space membership value is defined as the mem-
bership degree of the trajectory location hx
i
, y
i
i to the spatial grid
cell r
i
.
Actually, the space membership value is inversely proportional
to the relative distance between hx
i
, y
i
i and r
i
. By means of a mem-
bership function, the trajectory location hx
i
, y
i
i can be transformed
into the grid-labeled data hr
i
, m
i
i, where r
i
is the label of assigned
grid cell and m
i
denotes the corresponding membership value.
Note that the trajectory location hx
i
, y
i
i may be mapped into more
than one neighboring grid cell with membership values.
Definition 4. The number of partitioned spatial grid cells e is
defined as the desired space granularity to view the spatial data.
The larger the value e is, the finer the granularity of space is. On the
contrary, the smaller the number of the partitioned grid cells is, the
coarser the space granularity is.
However, selecting the value of e in data analysis is not trivial.
Too large granularity may damage the pattern semantics, while too
small granularity may result in a small number (or none in the
worst case) of patterns and high computation cost. In practice, e
can be determined based on domain knowledge.
Definition 5. In the vague space partition, the crisp zone radius r is
defined as the ratio of crisp zone area to the unit grid cell area.
Unlike the regular grid cell, the vague grid cell is comprised of a
crisp zone and an intermediate zone. Trajectory location distrib-
uted in the crisp zone is exclusively assigned to the grid cell con-
taining it with a constant membership value 1. But for the
intermediate zone, location situated in it may be assigned to more
than one neighboring cell.
Definition 6. A frequent trajectory pattern is that whose total
support in database is not less than the user-specified minimum
support threshold minsup.
Given a trajectory database D, a vague space partition member-
ship function and a minimum support threshold minsup, the objec-
tive of mining frequent trajectory pattern is to find the complete
set of the frequent patterns, i.e., all trajectory patterns r
i
!
D
t
i
r
j
.
4. Proposed method
4.1. Vague space partition method
In this subsection we will discuss how to partition the spatial
plane flexibly by vague way, and how to convert the original trajec-
tory dataset into transformed trajectory sequences.
Inspired by the rough set theory, we consider dividing the reg-
ular grid cell into a crisp zone and an intermediate zone. By this
way, we can build a novel grid cell, namely vague grid cell. Fig. 2
depicts three vague grid cells, s
1
, s
2
and s
3
, which are distributed
uniformly over the spatial plane. The part inside the circle of vague
grid cell is defined as the crisp zone, and the one outside the crisp
1
s
2
s
3
s
4
s
5
s
6
s
7
s
8
s
9
s
10
s
1
p
2
p
3
p
4
p
'
1
p
'
2
p
'
3
p
'
4
p
Fig. 1. Example of the sharp boundary problem.
102 L. Wang et al. / Knowledge-Based Systems 50 (2013) 100–111
剩余11页未读,继续阅读
2021-02-07 上传
2021-02-10 上传
2021-06-30 上传
101 浏览量
193 浏览量
109 浏览量
140 浏览量
137 浏览量

weixin_38572960
- 粉丝: 2
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- ZPM:基于premake5的C ++软件包管理器
- hymenoptera_data.zip
- 经销商管理——经销商如何在厂商交易中立于不败之地
- kafka-stream-money-deserialization:一个用于研究Spring Kafka Streams的序列化反序列化问题的演示项目
- 初级java笔试题-my-study-tracking-list:我的学习跟踪列表
- gRPC节点:使用Node JS的gRPC演示
- google_maps_webservice
- 白酒高端产品选择经销商的误区
- git-count:计算您的提交
- 初级java笔试题-interview-prep-guide:面试准备指南
- Keil 软件最新版.rar
- wasm-udf-example
- 初级java笔试题-code-tasks:从@jwasham克隆-我的学习仪表板
- 红色状态::chart_increasing:齿轮创建者的正常运行时间监控器和状态页面,由@upptime提供支持
- vue-monoplasty-slide-verify:Vue幻灯片验证在线预览
- JDK8版本jdk-8u202-linux-arm32-vfp-hflt.tar(gz).zip
