计算机视觉基础: pinhole相机模型解析
需积分: 0 62 浏览量
更新于2024-06-15
收藏 2.19MB PDF 举报
"cs231a-course-note-pdf"
这篇笔记主要介绍了计算机视觉课程CS231A中的基础知识,特别是关于相机模型的内容。课程的第一讲主要围绕相机如何模拟真实世界并生成图像来展开。
1. 相机模型简介
在计算机视觉领域,相机是捕获和理解周围环境的关键设备。理解相机的工作原理对于开发各种应用至关重要,例如图像处理、目标检测、图像识别等。因此,学习如何建立相机模型是入门课程的基础。
2. 孔径相机模型(Pinhole Camera Model)
孔径相机模型是最简单的相机模型,也称为针孔相机模型。这个模型基于一个基本概念:通过一个细小的孔洞(孔径)让光线进入,来记录3D物体的图像。在这个模型中,3D物体上的每个点都会发出多个光线。如果没有障碍物,这些光线会散射到整个感光材料(如胶片或传感器)上。但当在物体和感光材料之间设置一个带有孔洞的屏障时,只有少数光线能穿过孔洞并打在感光材料上。这就建立了3D物体点与感光材料上点的一对一映射关系,形成图像。
3. 图像形成过程
在孔径相机模型中,光线通过孔洞后会在感光材料上形成倒立的实像。这是因为光线经过透镜系统后,从各个方向来的光线汇聚于一点,形成了图像。这种模型虽然简化了实际相机的复杂性,但它为理解和解释实际相机的工作原理提供了基础。
4. 实际相机的复杂性
实际的相机系统比孔径模型更复杂,通常包括镜头、光圈、焦距等元素,可以调整以改变图像的亮度、对比度和景深。镜头负责聚焦光线,光圈控制进光量,而焦距决定了相机的视野范围。此外,现代相机还包括色彩感知、曝光时间、ISO灵敏度等更多参数。
5. 像素与图像采样
在数字相机中,感光材料被像素阵列替代,每个像素对应图像中的一个采样点。相机将光线转换为电信号,然后由图像传感器读取并转化为数字图像数据。
6. 立体视觉与多视图几何
了解单个相机模型后,后续的课程可能会深入到立体视觉和多视图几何,研究如何利用多个相机或不同视角的图像来获取三维信息,这是机器人导航、增强现实等领域的重要技术。
7. 应用场景
掌握相机模型和相关理论对于开发自动驾驶系统、无人机导航、虚拟现实、医学成像等众多领域至关重要,它为计算机理解并重建现实世界提供理论基础。
CS231A课程的这一部分旨在为学生建立对相机成像原理的基本理解,为后续深入学习计算机视觉算法和技术打下坚实基础。
lens object
film
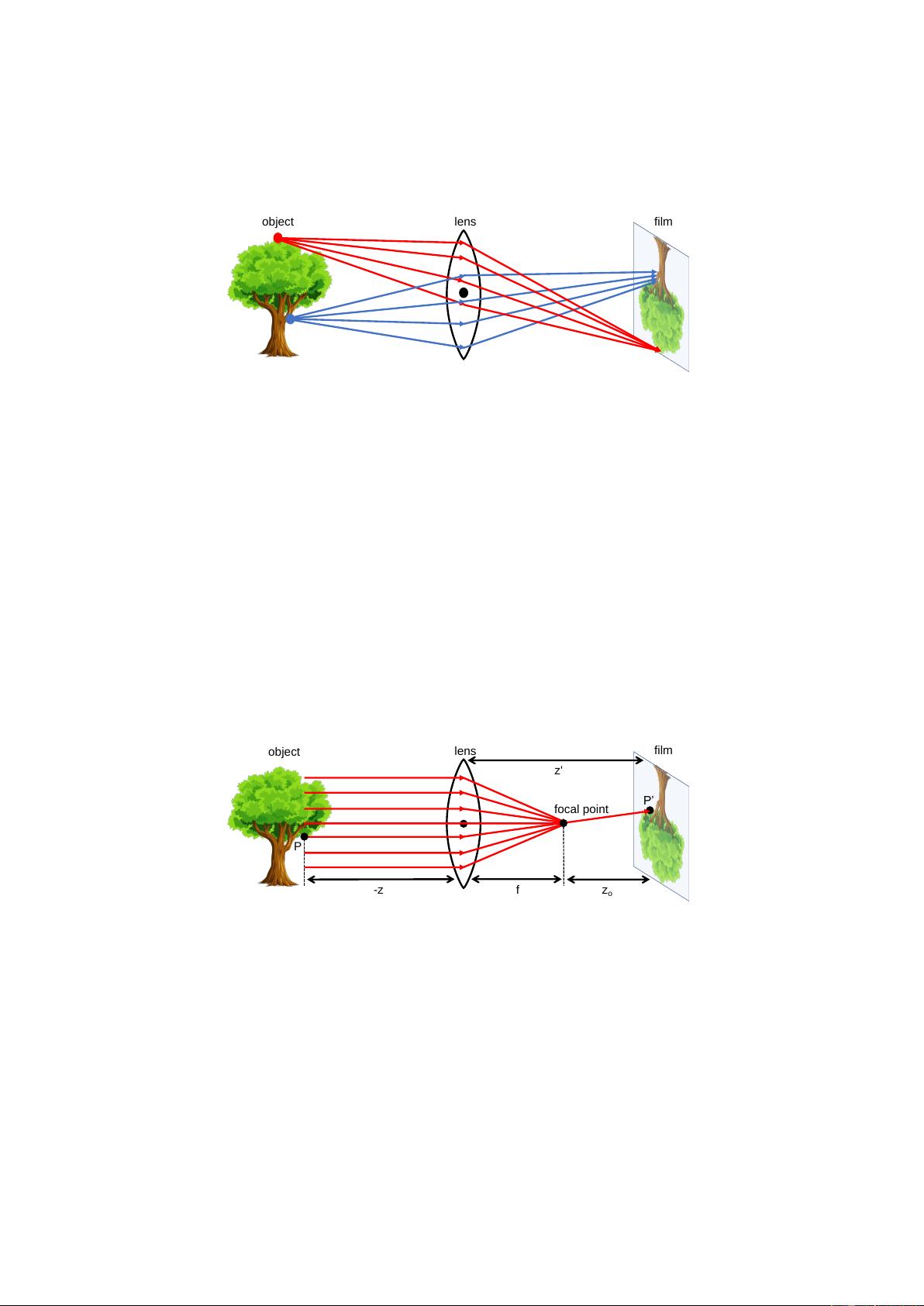
Figure 4: A setup of a simple lens model. Notice how the rays of the top
point on the tree converge nicely on the film. However, a point at a different
distance away from the lens results in rays not converging perfectly on the
film.
in the image plane. Therefore, the problem of the majority of the light rays
blocked due to a small aperture is removed (Figure 4). However, please note
that this property does not hold for all 3D points, but only for some specific
point P . Take another point Q which is closer or further from the image
plane than P . The corresponding projection into the image will be blurred
or out of focus. Thus, lenses have a specific distance for which objects are
“in focus”. This property is also related to a photography and computer
graphics concept known as depth of field, which is the effective range at
which cameras can take clear photos.
lens
film
object
z'
z
o
-z
f
P
P’
focal point
Figure 5: Lenses focus light rays parallel to the optical axis into the fo-
cal point. Furthermore, this setup illustrates the paraxial refraction model,
which helps us find the relationship between points in the image plane and
the 3D world in cameras with lenses.
Camera lenses have another interesting property: they focus all light rays
traveling parallel to the optical axis to one point known as the focal point
(Figure 5). The distance between the focal point and the center of the lens
is commonly referred to as the focal length f. Furthermore, light rays
4
剩余16页未读,继续阅读
2023-08-03 上传
2023-11-21 上传
2024-10-17 上传
2024-10-17 上传

Ricky050
- 粉丝: 34
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
