PLC控制的液压面粉码垛机器人设计
166 浏览量
更新于2024-06-24
1
收藏 1.72MB DOC 举报
"这篇学士学位论文探讨了基于PLC控制的面粉码垛机的设计,主要涉及机械结构、液压系统和控制系统的设计与分析。"
在本文中,作者深入研究了一种用于面粉码垛作业的机器人,它利用PLC(可编程逻辑控制器)进行精准控制。PLC是工业自动化领域的核心组成部分,能够实现对复杂机械动作的编程和控制,确保码垛过程的高效和准确。
1. 题目意义:随着工业生产现代化的推进,码垛机器人的需求日益增长,它们能提高效率、降低人工劳动强度。通过PLC控制的码垛机设计,有助于实现这一目标。
2. 设计内容:论文涵盖了码垛机的整体设计、机械手各部件的设计分析以及液压和控制系统的设计。其中,码垛机械手包括末端操作器、手腕、手臂和机身等关键组件,每个部分都进行了详细的设计和载荷计算。
3. 机械结构设计:码垛机的抓取结构由末端操作器、手腕、手臂和机身组成,每个部分都需要承受特定的载荷,因此在设计时需要进行载荷计算,确保结构的稳定性和可靠性。
4. 载荷计算:论文详细介绍了各个部件的载荷计算,包括手指夹紧机构、手臂伸缩和俯仰机构以及机身摆动机构的力矩计算,这些计算是确定结构尺寸和材料选择的基础。
5. 液压系统设计:液压系统是驱动码垛机动作的关键,文中讨论了基本方案的制定和液压元件的选择,确保系统的动力输出和动作的精确执行。
6. 控制系统设计:PLC是控制系统的核心,文章详细介绍了PLC的选型、硬件配备、输入输出地址分配以及电气控制线路设计,这些内容对于实现码垛机的自动化控制至关重要。
7. 结论与展望:论文总结了整个设计过程中的关键点,提出了机械手的改进措施,并展望了其在工业生产中的应用前景和可能的发展方向。
关键词:码垛、液压、自由度
这篇论文提供了一个实际的工程案例,不仅展示了基于PLC控制的码垛机设计方法,还涵盖了机械设计、液压系统设计和自动化控制等多个领域,对于学习和理解工业机器人技术具有很高的参考价值。
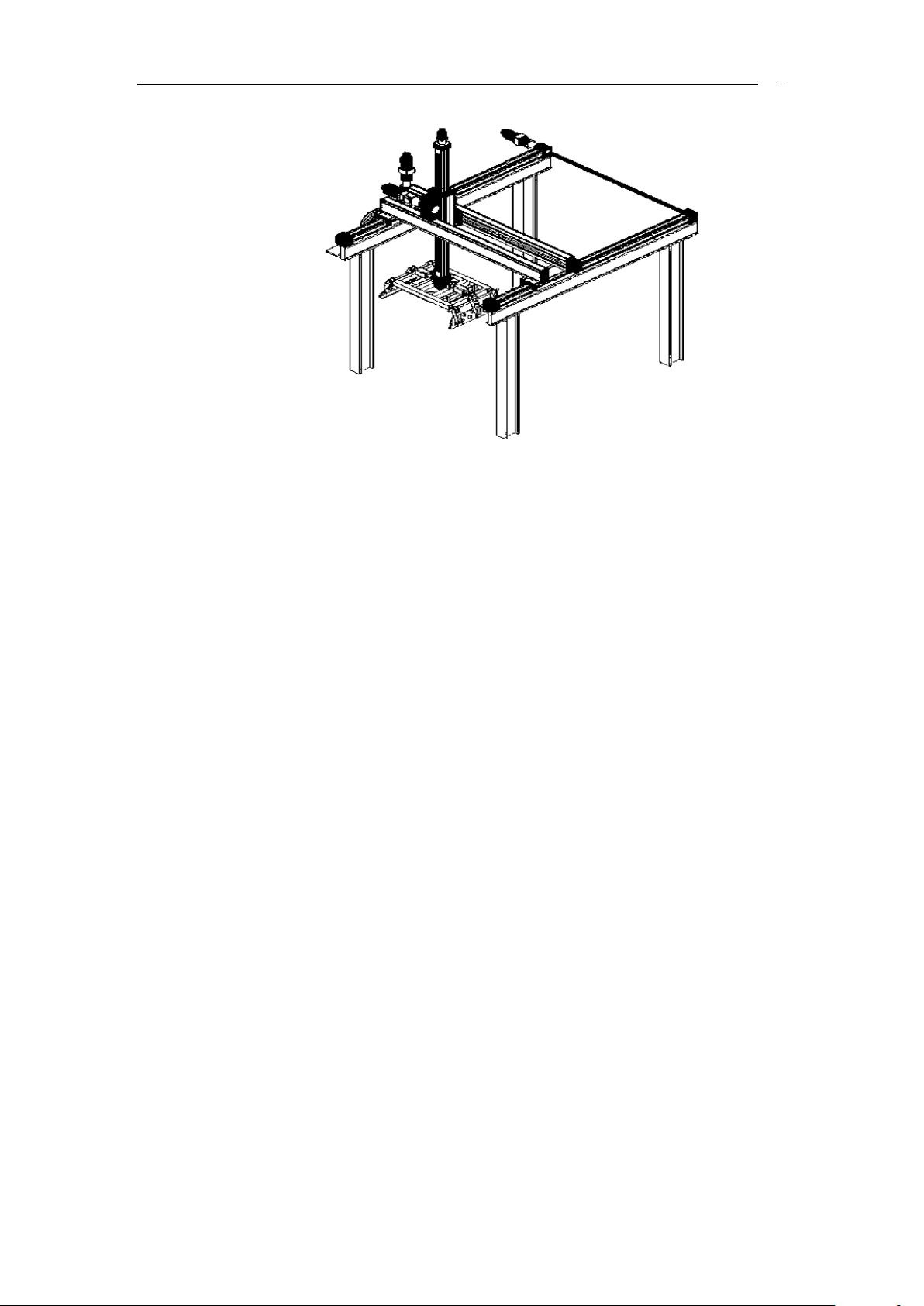
面粉码垛机器人
9
9
图 1-3
1.6 本设计主要研究的内容:
本课题研究的机械手一共拥有五个自由度,采用全液压的方式驱动,本说明
书所陈述的具体解决问题如下:
1.6.1(1):机械部分:
码垛机应有的实行机构,由手爪、手腕、手臂、支座组成。手爪是抓取机构,
用来夹紧或是松开喷枪,具体可以模范人手做参考,可以像人手一样抓取面粉袋。
手腕是连接手指和手臂的元件,可以进行俯仰动作。简单的码垛机可以没有手腕,
而只有手臂,手臂的动作和手腕相类似,只是动作范围更大,可以前后伸缩,上
下俯仰和左右摆动等。支柱用来支撑手臂,它是固定的。
结构部分说明:
1.机身结构:
机身采用回转与俯仰结构机身。实现回转的驱动方案有几种,摆动油缸驱动,
升缩油缸在上,回转油缸在下。实现机身回转采用液压马达驱动。
1. 运动形式方案选择:
为了实现不同的运动,应该选用不同的设计方案,所以本设计本人确定采
用球坐标机构。
2. 手臂结构:
手臂的运动方式为左右转动、前后伸缩及上下摆动,其中上下摆动采用手臂
俯仰油缸与活塞杆机构连用来实现,手臂的前后伸缩采用直线缸来实现。

剩余49页未读,继续阅读
2023-07-02 上传
2023-07-09 上传
2023-07-09 上传
2023-07-10 上传
2023-07-01 上传
2023-07-01 上传

yyyyyyhhh222
- 粉丝: 446
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
