MT9D111:1/3.2英寸2百万像素SOC数字图像传感器详解
需积分: 50 61 浏览量
更新于2024-07-29
收藏 2.74MB PDF 举报
"MT9D111是一款1/3.2英寸的200万像素系统级芯片(SOC)数字图像传感器,由Micron Technology, Inc.制造。这款传感器采用了Digital Clarity CMOS成像技术,旨在提供卓越的低光性能、超低功耗和低成本解决方案。它内置主时钟,由片上锁相环振荡器(PLL)生成,支持电子滚动快门(ERS)和逐行扫描模式。"
MT9D111的关键特性包括:
1. Digital Clarity CMOS Imaging Technology:这一技术提升了图像质量,特别是在低光照环境下的表现,通过优化的电路设计和处理算法,实现了清晰且噪点少的图像。
2. Superior low-light performance:MT9D111在光线较暗的环境下仍能保持良好的成像效果,这对于需要在夜间或低光条件下工作的摄像头尤其重要。
3. Ultra-low-power, low-cost:该传感器设计为低功耗,降低了运行成本,适用于需要长时间工作的应用,如监控摄像头或移动设备。
4. Internal master clock generated by on-chip phase-locked loop oscillator (PLL):PLL生成的内部主时钟确保了传感器时序的精确性,从而保证了高质量的图像同步。
5. Electronic rolling shutter (ERS), progressive scan:电子滚动快门提供了连续的图像捕获,适合动态场景,而逐行扫描则减少了图像失真。
6. Integrated image flow processor (IFP) for single-die camera module:集成的图像流处理器使得在单芯片上实现完整的摄像头模块成为可能,简化了设计并降低了成本。
7. Automatic image correction and enhancement:包括镜头阴影校正在内的自动图像修正和增强功能,可以自动调整图像的色彩平衡和曝光,提高图像的整体质量。
8. Arbitrary image decimation with anti-aliasing:任意图像下采样功能结合抗混叠处理,防止高频信号失真,确保图像清晰度。
9. Integrated real-time JPEG encoder:实时JPEG编码器内置在传感器中,能够快速压缩图像数据,节省存储空间并加快数据传输速度。
10. Integrated microcontroller for flexibility:集成的微控制器提供了更大的设计灵活性,可以处理各种控制任务和用户自定义功能。
11. Two-wire serial interface:通过两线串行接口,可以访问传感器的寄存器和微控制器内存,简化了与外部系统的通信。
MT9D111是一款集成了多种高级功能的高性价比图像传感器,适用于需要高质量图像处理和低功耗操作的应用,如安防监控、移动设备摄像头、工业自动化和汽车电子等领域。由于其强大的功能和灵活性,它在许多现代电子设备中都发挥着关键作用。

PDF: 09005aef8202ec2e/Source: 09005aef8202ebf7 Micron Technology, Inc., reserves the right to change products or specifications without notice.
MT9D111__2_REV5.fm - Rev. B 2/06 EN
16 ©2004 Micron Technology, Inc. All rights reserved.
MT9D111 - 1/3.2-Inch 2-Megapixel SOC Digital Image Sensor
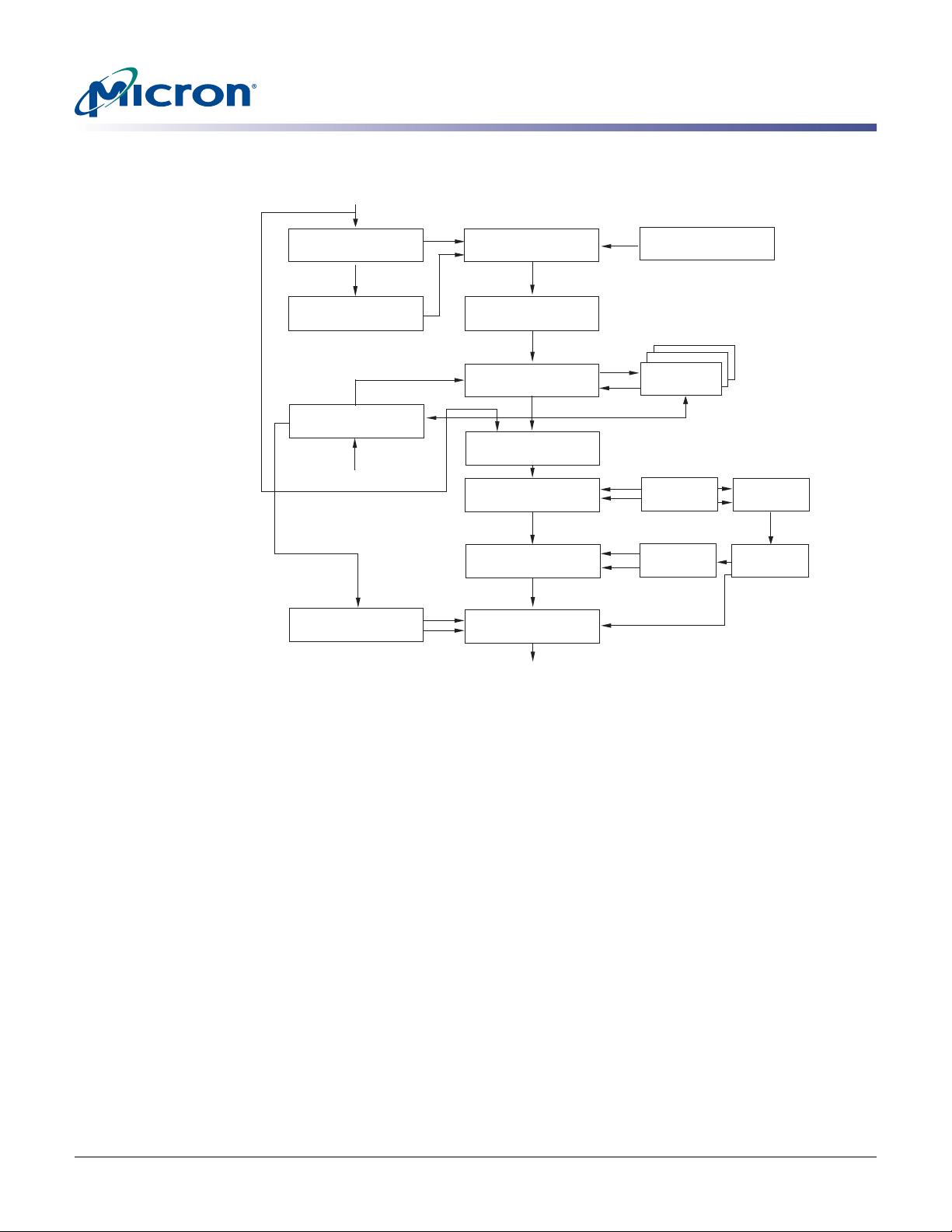
Architecture Overview
Micron Confidential and Proprietary
Color Correction and Aperture Correction
In order to achieve good color fidelity of IFP output, interpolated RGB values of all pixels
are subjected to color correction. The IFP multiplies each vector of three pixel colors by a
3 x 3 color correction matrix. The three components of the resulting color vector are all
sums of three 10-bit numbers. Since such sums can have up to 12 significant bits, the bit
width of the image data stream is widened to 12 bits per color (36 bits per pixel). The
color correction matrix can be either programmed by the user or automatically selected
by the auto white balance (AWB) algorithm implemented in the IFP. Color correction
should ideally produce output colors that are independent of the spectral sensitivity and
color cross-talk characteristics of the image sensor. The optimal values of color correc-
tion matrix elements depend on those sensor characteristics and on the spectrum of
light incident on the sensor.
To increase image sharpness, a programmable aperture correction is applied to color
corrected image data, equally to each of the 12-bit R, G, and B color channels.
Gamma Correction
Like the aperture correction, gamma correction is applied equally to each of the 12-bit R,
G, and B color channels. Gamma correction curve is implemented as a piecewise linear
function with 19 knee points, taking 12-bit arguments and mapping them to 8-bit out-
put. The abscissas of the knee points are fixed at 0, 64, 128, 256, 512, 768, 1024, 1280,
1536, 1792, 2048, 2304, 2560, 2816, 3072, 3328, 3584, 3840, and 4095. The 8-bit ordinates
are programmable via IFP registers or public variables of mode driver (ID = 7). The driver
variables include two arrays of knee point ordinates defining two separate gamma
curves for sensor operation contexts A and B.
YUV Processing
After the gamma correction, the image data stream undergoes RGB to YUV conversion
and optionally further corrective processing. The first step in this processing is removal
of highlight coloration, also referred to as “color kill.” It affects only pixels whose bright-
ness exceeds a certain pre-programmed threshold. The U and V values of those pixels
are attenuated proportionally to the difference between their brightness and the thresh-
old. The second optional processing step is noise suppression by 1-dimensional low-
pass filtering of Y and/or UV signals. A 3- or 5-tap filter can be selected for each signal.
Image Cropping and Decimation
To ensure that the size of images output by MT9D111 can be tailored to the needs of all
users, the IFP includes a decimator module. When enabled, this module performs “deci-
mation” of incoming images, i.e. shrinks them to arbitrarily selected width and height
without reducing the field of view and without discarding any pixel values. The latter
point merits underscoring, because the terms “decimator” and “image decimation” sug-
gest image size reduction by deleting columns and/or rows at regular intervals. Despite
the terminology, no such deletions take place in the decimator module. Instead, it per-
forms “pixel binning”, i.e. divides each input image into rectangular bins corresponding
to individual pixels of the desired output image, averages pixel values in these bins and
assembles the output image from the bin averages. Pixels lying on bin boundaries con-
tribute to more than one bin average: their values are added to bin-wide sums of pixel
values with fractional weights. The entire procedure preserves all image information
that can be included in the downsized output image and filters out high-frequency fea-
tures that could cause aliasing.
The image decimation in the IFP can be preceded by image cropping and/or image dec-
imation in the sensor core. Image cropping takes place when the sensor core is pro-
grammed to output pixel values from a rectangular portion of its pixel array - a window -



剩余185页未读,继续阅读
296 浏览量
点击了解资源详情
点击了解资源详情
119 浏览量
136 浏览量
194 浏览量
191 浏览量
2021-08-12 上传

共享to未来
- 粉丝: 569
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
