倒置摆控制系统设计与分析
版权申诉
"现代控制工程课程设计主要涵盖了倒置摆系统的状态空间建模、特性分析、稳定性和控制策略。设计目标在于深入理解现代控制理论的基本概念,掌握状态方程的运用,以及状态反馈和全维观测器设计。设计要求包括理论计算、MATLAB编程和SIMULINK仿真,以提升计算和控制系统的实际应用能力。"
在现代控制工程中,课程设计通常以实际问题为例,如本案例中的单倒置摆系统,来帮助学生巩固理论知识并提高实践技能。设计目的有四点:一是加深对现代控制理论基本概念的理解;二是掌握如何用状态空间方程描述线性系统,并进行稳定性、能控性和能观性的分析计算;三是学习状态反馈系统的综合方法;四是提高MATLAB编程和仿真能力,以增强计算机辅助分析计算的实践操作。
倒置摆系统因其不稳定性质,需要控制力来维持垂直状态。状态空间方程的建立是分析系统动态行为的关键。在忽略次要因素后,如摆杆质量、电机惯性等,系统简化为两个状态变量——小车的位置z和摆的角度θ。通过牛顿第二定律,可以得到关于z和θ的非线性方程,然后进行线性化处理。线性化后的方程可用于建立状态空间模型,如式(5)和式(6),最终得到输入u与输出z的微分方程。
在这个过程中,可控性和可观性分析用于确定系统的控制性能。如果系统是可控的,意味着可以通过状态反馈来改变其动态行为;而可观性则关乎能否通过系统输出获取所有状态信息。此外,稳定性分析是保证系统长期运行的关键,通过适当的控制器设计,可以确保倒置摆保持稳定。
全维状态观测器的设计是课程设计的另一重点,它能够估计系统所有状态变量,即使这些变量不能直接测量。通过MATLAB仿真,可以验证控制器和观测器的效果,观察系统在不同条件下的响应,进一步优化控制策略。
现代控制工程课程设计旨在通过具体实例让学生熟练掌握控制理论的核心概念和技术,提升实际工程问题的解决能力,同时锻炼编程和仿真的实战技能。
1
一、设计目的及要求
设计目的
1、通过课程报告加深理解现代控制理论中的一些基本概念;
2、掌握用状态方程描述的线性系统的稳定性、能控性、能观性的分析计算
方法;
3、掌握状态反馈系统的综合和全维观测器设计方法
4、重视理论计算,MATLAB 编程计算及 SIMULINK 仿真能力,提高计算
机编程计算能力。
设计要求
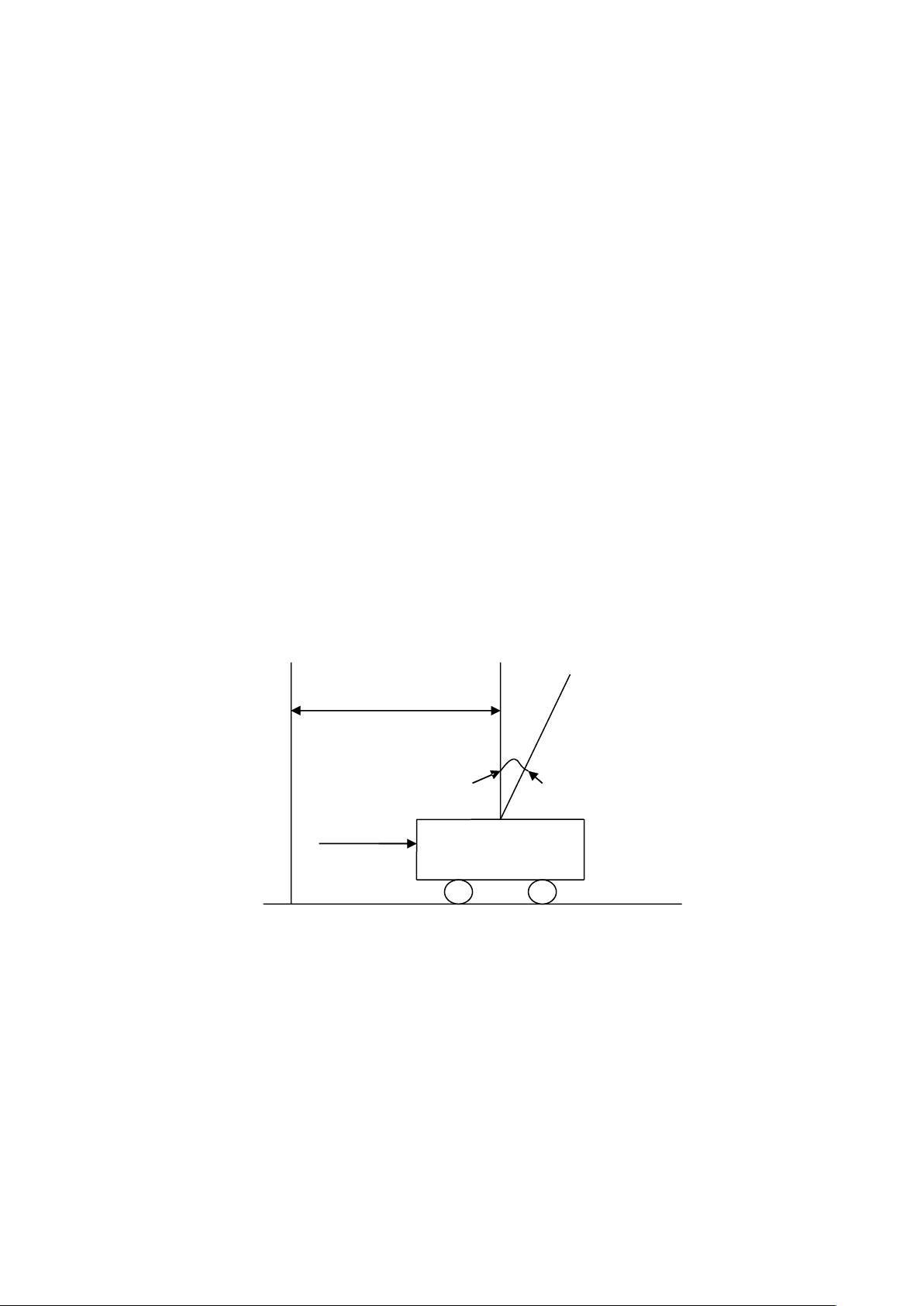
如图 1 所示,为单倒置摆系统的原理图。设摆的长度为、质量为 m,用铰链
安装在质量为 M 的小车上。小车有一台直流电动机拖动,在水平方向对小车施加
控制力 u,相对参考系产生位移 z。若不给小车施加控制力,则倒置摆会向左或向
右倾倒,因此,它是一个不稳定系统。控制的目的是,当倒置摆无论出现向左或
向右倾倒时,通过控制直流电动机,使小车在水平方向运动,将倒置摆保持在垂
直位置上。
二、状态空间方程建立
为简化问题,工程上可以忽略一些次要因素。在本例中,我们为了简化问题,
方便研究系统空间的设计问题,忽略了摆杆质量、执行电动机惯性以及摆轴、轮
轴、轮与接触面之间的摩擦及风力。设小车的瞬时位置为 z,倒置摆出现的偏角
为θ,则摆心瞬时位置为
)sin(
�
lz �
。在控制力 u 的作用下,小车及摆均产生加
速运动,根据牛顿第二定律,在水平直线运动方向的惯性力应与控制力 u 平衡,
M
Z
u
�
图 1 单倒置摆系统的原理
m
L
剩余14页未读,继续阅读
2022-07-04 上传
2024-01-05 上传
2022-06-20 上传
1275 浏览量
2022-11-20 上传
103 浏览量
2009-12-31 上传

文档优选
- 粉丝: 98
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







