最少拍设计与计算机控制系统详解
需积分: 1 193 浏览量
更新于2024-09-14
收藏 157KB DOCX 举报
本文主要讨论了微型计算机控制的相关知识点,包括最少拍设计、计算机控制系统结构、前馈控制与反馈结合的应用、增量型PID控制、振铃现象的消除以及4位ADC(Analog-to-Digital Converter)的逐次逼近转换过程。以下是对这些主题的详细阐述:
1. **最少拍设计**:最少拍设计是系统设计中的一个重要概念,它强调在处理典型输入信号(如阶跃、速度和加速度信号)时,系统应能在有限个采样周期内(即最少拍)达到稳态,确保输出的稳态误差为零。这对于保证系统的快速响应和精度至关重要。
2. **计算机控制系统**:计算机控制系统由硬件和软件两大部分组成。硬件主要包括控制对象、执行器、测量变送环节、输入输出通道和数字调节器等,它们协同工作实现对生产过程的精确控制。软件则包含系统软件和控制软件,前者负责底层操作,后者负责算法实现和控制策略。
3. **前馈控制**:前馈控制需要满足扰动完全补偿的条件,即能够准确测量扰动并提前调整系统参数。结合反馈控制,可以有效抑制次要扰动,同时保持较高的系统稳定性,减少稳态误差。
4. **增量型PID控制**:PID(Proportional-Integral-Derivative)控制是一种常用的控制器设计方法,增量型PID通过计算当前误差与上一时刻误差的变化来更新控制信号,具体控制算式涉及比例、积分和微分项的系数。
5. **振铃现象与消除**:振铃现象是数字控制器输出的高频振荡,可能导致执行机构损坏。消除振铃可通过参数选择法调整惯性时间和采样周期,使RA小于或等于零,或者通过消除振铃因子法修改控制器的极点位置,优化动态特性。
6. **4位AD转换器**:在4位ADC中,当输入4.15V模拟电压时,逐次逼近法转换过程涉及逐个比较并确定每位状态。量化单位为0.3125V,转换过程中从最高位开始,通过模拟电压比较确定是否保留或清除每一位。
7. **双线性变换和控制器设计**:双线性变换是一种将连续域的系统转换为离散域的方法,适用于控制器设计。给定一阶前向和后向差分法,以及采样周期T=1s,用户需利用这些工具求解控制器的差分方程,以便于实现精确的控制器模型。
8. **被控对象的传递函数**:最后,被控对象的传递函数是系统分析的关键,它描述了输入信号如何影响输出信号。对于采样周期T=1s,该函数提供了关于系统动态响应的重要信息,用于控制器设计和系统分析。
本文涵盖了计算机控制系统的基础理论、实际应用和设计技巧,帮助读者深入理解如何设计和优化基于计算机的控制系统。
1 、何为最少拍设计?
答:最少拍设计,是指系统在典型输入信号(如阶跃信号,速度信号,加速度信
号等)作用下,经过最少拍(有限拍),使系统输出的稳态误差为零。
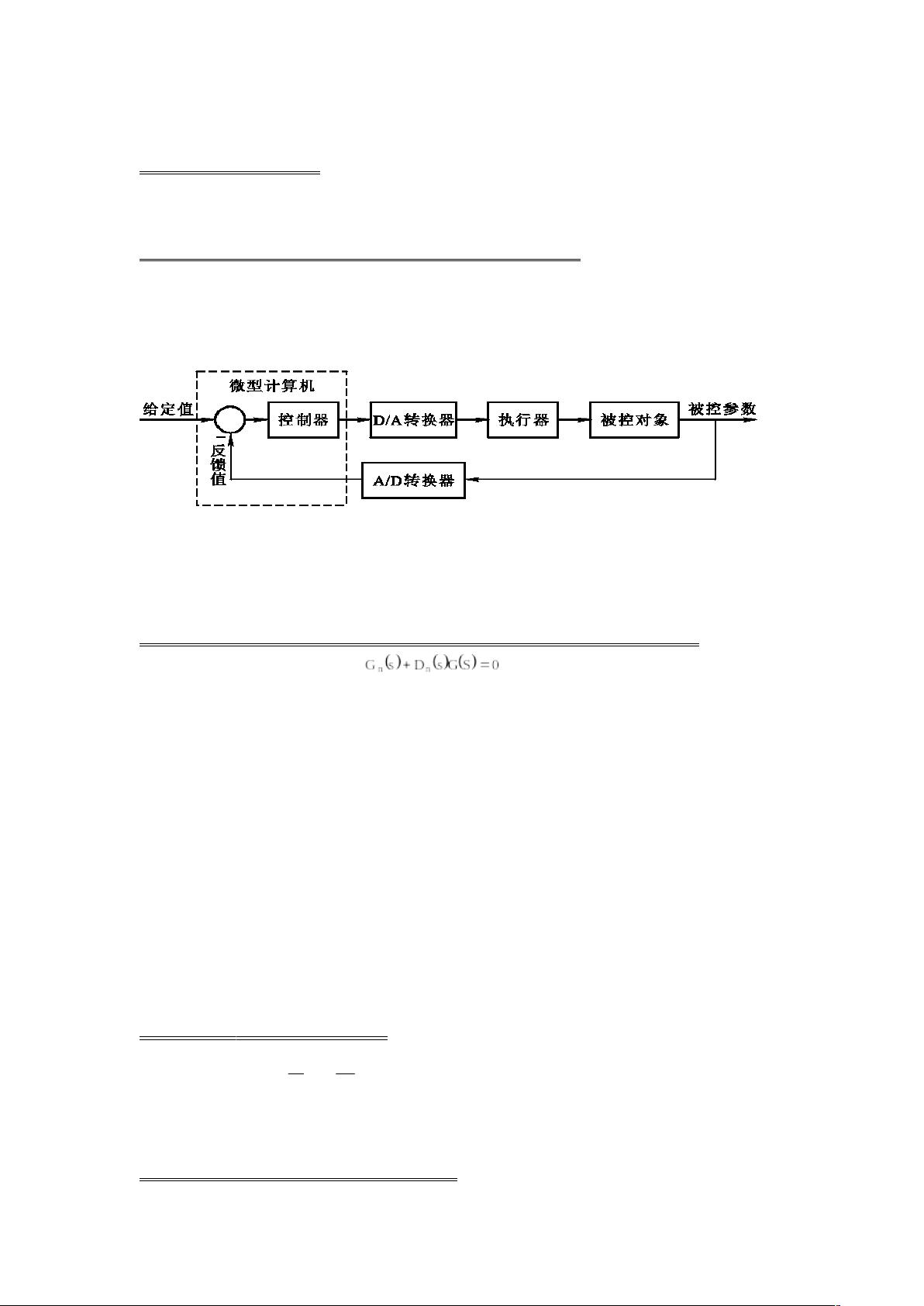
2 、计算机控制系统有哪些部分组成,并画出方框图。
答:计算机控制系统的硬件组成主要是由控制对象(或生产过程)、执行器、
测量变送环节、输入输出通道和数字调节器等组成。软件组成主要是由系统软
件和控制软件。
计算机控制系统基本原理图
3. 前馈控制完全补偿的条件是什么?前馈和反馈相结合有什么好处?
前馈控制完全补偿的条件是 。
如果能将扰动因素测量出来,预先将其变化量送到系统中进行调整,这样在被
调量改变之前就能克服这些扰动的影响。这种扰动的预先调整作用就称为前馈。
主要扰动引起的误差,由前馈控制进行补偿;次要扰动引起的误差,由反馈控
制予以抑制,这样在不提高开环增益的情况下,各种扰动引起的误差均可得到
补偿,从而有利于同时兼顾提高系统稳定性和减小系统稳态误差的要求。
写出增量型
PID
的控制算式。
4. 何为振铃现象?如何消除振铃现象?
1 1 2
[( ) ( 2 )]
d
i i i i i i i
i
T
T
u K e e e e e e
T T
下载后可阅读完整内容,剩余9页未读,立即下载
2021-06-18 上传
2019-01-11 上传
2023-06-07 上传
2011-07-14 上传
2009-10-29 上传
2014-02-08 上传
2021-09-28 上传

qq_20415173
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
