离散时间线性时变系统状态估计:从贝叶斯到卡尔曼滤波
"《贝叶斯滤波到卡尔曼滤波及其拓展》是一份详细探讨滤波理论的学术资料,由朱俊撰写。该文档深入介绍了从基础的贝叶斯滤波理论到卡尔曼滤波及其各种拓展应用,涵盖了概率密度函数的处理、矩阵运算技巧以及状态估计问题的解决方法。
1. **问题定义**:
状态估计问题关注的是在给定初始状态信息、一系列观测数据和输入信号的情况下,如何通过线性时变系统的运动和观测模型来估算系统的真实状态。其中,初始状态、输入噪声和观测噪声通常假设为独立且零均值的高斯分布。
2. **联合高斯概率密度函数**:
在概率论中,联合高斯分布是多个变量同时服从正态分布的情况。文档中提到,对于服从多元正太分布的变量,其联合概率密度函数有特定的表达形式。在贝叶斯滤波和卡尔曼滤波中,这种分布用于描述状态和噪声的概率特性。
3. **Sherman-Morrison-Woodbury等式**:
这是一个矩阵求逆的等式,它简化了矩阵逆运算,尤其在处理大型矩阵时非常有用。在卡尔曼滤波中,这一等式常用于计算高斯分布的协方差矩阵,因为卡尔曼滤波涉及到大量的矩阵操作和逆运算。
4. **从贝叶斯推断到卡尔曼滤波**:
贝叶斯滤波是一种统计推断方法,卡尔曼滤波是其在特定条件下的特殊情况。文档展示了如何从贝叶斯框架出发,利用高斯假设推导出卡尔曼滤波的公式。在卡尔曼滤波中,先验状态(未包含观测信息)和后验状态(包含观测信息)都是高斯分布。
5. **拓展卡尔曼滤波**:
文档讨论了两种推导方法:一种是基于联合概率密度的方式,另一种是基于贝叶斯方式。这两种方法都旨在扩展卡尔曼滤波以适应更复杂的系统模型,例如非线性系统或存在非高斯噪声的情况。
6. **迭代拓展卡尔曼滤波**:
在处理非线性系统时,迭代卡尔曼滤波通过多次迭代逼近最优解,每次迭代都会更新状态估计和协方差矩阵,以更准确地跟踪系统状态。
7. **小结**:
文档最后对整个主题进行了总结,强调了滤波理论的核心概念及其在实际问题中的应用。
这份文档为读者提供了一个全面的框架,从基础理论到高级应用,帮助理解和掌握滤波技术,特别是卡尔曼滤波在状态估计中的应用。对于研究或工程实践中涉及信号处理、控制理论和数据分析的人员来说,这是一份宝贵的参考资料。"
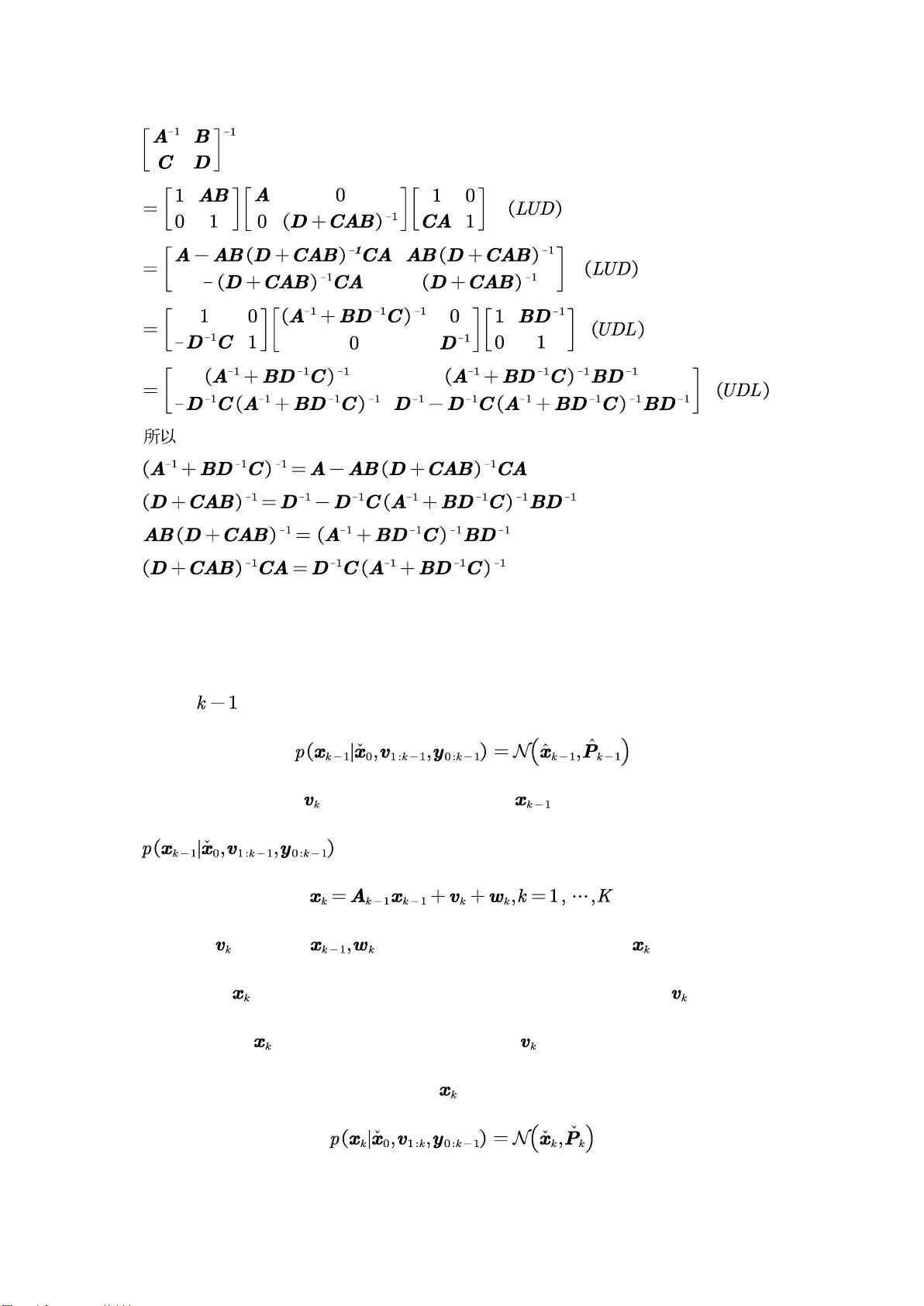
上面的式子在拓展卡尔曼滤波中经常用到!计算高斯分布协方差矩阵!!
4. 从贝叶斯推断推导卡尔曼滤波
设 时刻的高斯先验为:
首先考虑输入 , 上 一 个 时 刻 的 状 态 的 分 布 目 前 已 经 知 道 , 即
。由运动方程
知道 之后结合 都是高斯分布这个条件,可以对 的分布进行一次
计算,此时 也是高斯分布(高斯分布的和依然是高斯分布)!当 没有引入的
时候是没法对 的分布进行计算的!现在计算 分布就是计算两个高斯分布的
求和问题。假设在当前已有的条件下 服从如下高斯分布:
剩余15页未读,继续阅读
181 浏览量
2021-08-15 上传
2021-04-23 上传
2021-08-15 上传
2021-08-14 上传
2022-01-07 上传
点击了解资源详情
点击了解资源详情

qq_41093957
- 粉丝: 9
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi高手突破(官方版).pdf
- LoadRunner中文版文档
- MATLAB 训练讲义toStudents.pdf
- 计算机操作系统(汤子瀛)习题答案
- 构建SOA 的IT 捷径
- 2002年程序员上午试卷
- 雅思王路807 必备雅思工具
- modelsim编译xilinx库的方法.doc
- 西软宽带安全审计管理软件说明书
- kjava开发手册--介绍j2me开发的一些实践
- H.264.pdf,编码解码
- ASP.NET专业项目实例开发(修订版)-课件(部分3)
- ASP.NET专业项目实例开发(修订版)-课件(部分1)
- cuda中文手册--GPU的通用编程
- 2009最新java经典面试题目(包含答案)
- java设计模式中文版
