Apollo自动驾驶:深度解析感知技术与CNN应用
需积分: 9 199 浏览量
更新于2024-08-05
1
收藏 3.33MB PDF 举报
"Apollo自动驾驶入门课程深入探讨了自动驾驶的核心技术之一——感知,特别是卷积神经网络(CNN)在其中的应用。课程强调了CNN如何保留空间信息以有效地处理图像,以及在障碍物检测与分类中的关键作用。"
在自动驾驶领域,感知系统是至关重要的组成部分,它负责收集和解析来自各种传感器的数据,如摄像头、雷达、激光雷达(LiDAR)等,以理解车辆周围的环境。本课程聚焦于感知的下篇,主要讨论了卷积神经网络在图像处理和特征提取中的强大功能。
卷积神经网络(CNN)是一种专门设计用于处理具有网格状结构数据(如图像或视频)的深度学习模型。CNN通过卷积层、池化层和全连接层等结构,能自动学习和提取图像中的特征,从边缘、颜色到更复杂的形状和物体结构。这种层次化的特征学习使得CNN在图像识别、目标检测和分类任务中表现出色。
在自动驾驶的感知任务中,CNN被用来执行障碍物检测和分类。静态障碍物,如墙壁、树木和建筑物,以及动态障碍物,如行人和车辆,都需要被准确地识别和定位。CNN首先通过卷积操作来检测图像中的物体位置,然后将这些位置信息传递给后续的卷积层或全连接层,进一步对物体进行类别分类。例如,一辆自动驾驶汽车可能需要识别前方是否有自行车或车辆,以便调整行驶策略。
交通信号灯的检测和分类是另一个例子,CNN在这里同样发挥着关键作用。首先,车辆的摄像头捕获图像,然后CNN定位到图像中的交通信号灯,接着根据灯的颜色(红、黄、绿)对其进行分类,以确定车辆是否需要停车、减速或者继续行驶。
为了实现障碍物的检测和分类,有两种常见的CNN架构:一种是分离的检测和分类网络,即先用检测CNN找到物体位置,再用分类CNN进行物体类别判断;另一种是一体化网络,如YOLO(You Only Look Once)或SSD(Single Shot MultiBox Detector),它们可以同时完成检测和分类任务,提高了处理速度和效率。
在Apollo自动驾驶系统中,这样的感知技术被整合到整个自动驾驶框架中,与其他模块如定位、规划和控制协同工作,以实现安全、智能的自动化驾驶。通过不断的学习和优化,CNN和其他机器学习算法将进一步提升自动驾驶系统的性能和鲁棒性。
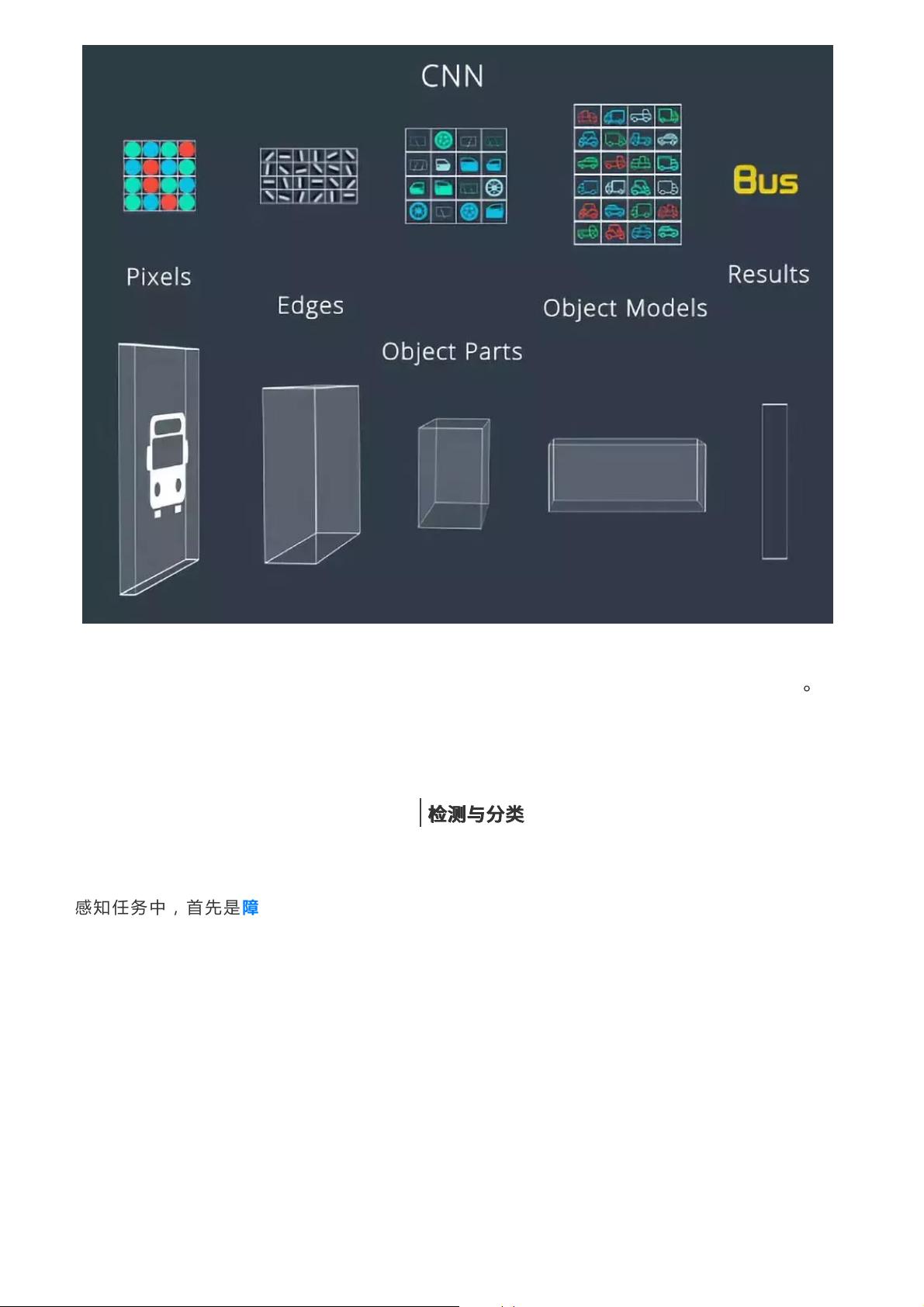
CNN根据其任务查找真正需要的特征,任务可能是图像检测、分类、分割、其他类型的目标
。
2
检
测
与
分
类
检
测
与
分
类
感 知 任 务 中 , 首 先 是 障 碍 物 检 测 和 分 类 , 在 驾 驶 过 程 中 会 遇 到 许 多 障 碍 物 , 静 态 障 碍 物 包 括 墙
壁、树木、杆子、建筑物;动态障碍物包括行人、自行车、汽车。计算机首先需要知道障碍物的
位置,然后进行分类。在路中行驶的无人驾驶车可能会探测到许多不同的物体,汽车根据所感知
的物体类型来确定路径和速度。如果感知到前方有一辆自行车,汽车可能会决定减速和变道,以
便安全驶过自行车。但是如果感知到前方有另一辆车,并预测到前方车辆也将以接近限速的速度
行驶,可能会保持其速度和车道。
剩余11页未读,继续阅读
781 浏览量
260 浏览量
303 浏览量
143 浏览量
466 浏览量
260 浏览量
128 浏览量
2020-11-15 上传

疯狂的机器人
- 粉丝: 9202
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- Outsons-crx插件
- Simulink Fixed-Point Tutorial R2006b(日文)演示文件:“SL Fixed-Point Tutorial”演示文件,这是“Fixed-point code generation tutorial using Simulink Fixed-Point / RTW-EC”的示例文件。-matlab开发
- MODS206
- trie-rs:在Rust中实现前缀树的库
- OpenSSL库文件头文件
- monitorapp:外部monitorapp
- SkypeServer-开源
- spring-hibernate:Spring + Hibernate项目
- Controle-e-Telemetria:用于收发器、PS2 控件和遥测的代码和演示
- python中split函数的用法-06-烤地瓜案例步骤分析.ev4.rar
- Bootstarp包和jQuery包,html5shiv和respond包
- Right-Click Search Google Shopping-crx插件
- html-css:知识库html e css
- koki-nakamura22.github.io:我的页面
- python中split函数的用法-05-了解烤地瓜案例需求.ev4.rar
- PIExtraction-:使用流程模型从执行日志中提取准确的性能指标
