SIFT算法在三维场景重建中的应用提升
150 浏览量
更新于2024-08-28
收藏 1.26MB PDF 举报
在"3D场景重建中的SIFT算法应用"这篇文章中,作者探讨了尺度不变特征变换(SIFT)算法如何提升3D场景重建系统的精度。首先,文章详细分析了SIFT算法的特点,它是一种在图像处理中广泛应用的关键点检测和描述子方法,其稳定性、旋转不变性和尺度不变性使其在复杂的视觉任务中表现出色。
3D场景重建通常涉及立体匹配技术,即将两幅或多幅图像中对应的部分对齐,以便推断出场景的三维结构。SIFT算法在这个过程中发挥关键作用,通过提取和匹配不同视角下的稳定特征点,有助于精确地识别和定位场景中的物体。文章简要介绍了3D重建的基本步骤,包括图像采集、特征提取、匹配以及后处理(如多视图几何、深度估计等)。
实验部分是文章的核心内容。作者使用SIFT算法对实验图像进行匹配,并根据不同的最近邻比(如RANSAC或 Lowe's Ratio Test)设置了匹配效果的阈值。实验结果显示,SIFT算法在3D场景重建中的匹配精度非常高,这得益于其对图像局部特征的强大描述能力。通过与传统方法如直接线性变换(DLT)或其他特征匹配算法的比较,SIFT的性能更为优越。
此外,文章还引入了一种基于光学折射的鱼眼相机近似模型,该模型首先从光学折射原理出发,结合鱼眼镜头的结构,然后通过线性化处理得到一个包含两个参数的近似模型。利用该模型,作者提出了一种利用双鱼眼图像之间的基线约束来估计模型参数的算法。实验部分不仅验证了模型在合成数据上的可行性,还通过实际鱼眼图像的测试进一步证明了其在复杂环境下的实用性。
这篇文章展示了SIFT算法在3D场景重建中的有效应用,特别是在处理高精度匹配和参数估计方面。通过与传统方法的对比,SIFT算法的性能优势被明确展现出来,为提高3D重建系统的整体性能提供了有力的支持。随着深度学习和计算机视觉的不断发展,SIFT算法仍然作为一种重要的基础技术,在未来的3D重建领域有着广阔的应用前景。
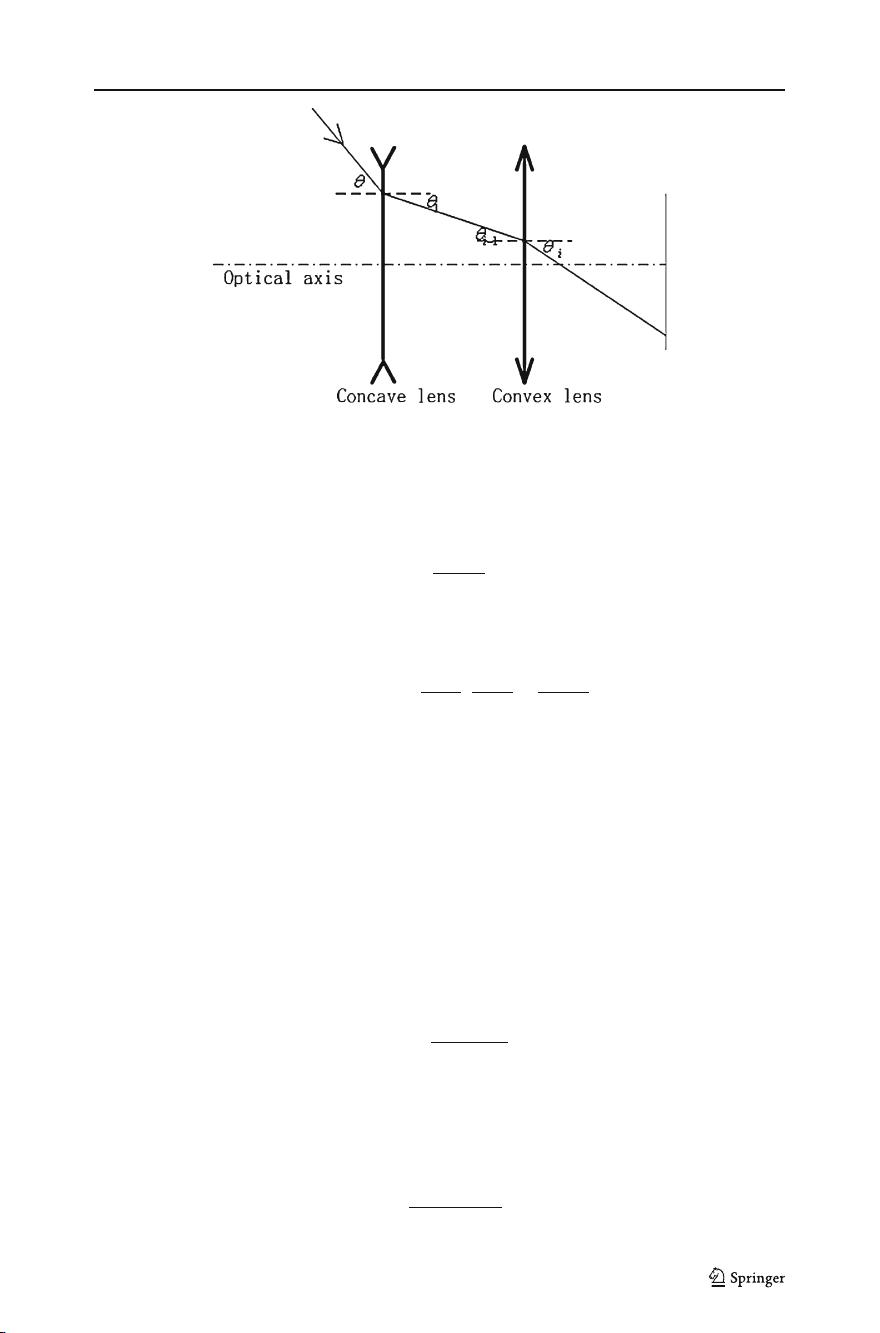
θ is the incident angle of the first lens, θ
1
represents the refraction angle of the first lens, θ
i–1
is the incidence angle of the i
th
lens, θ
i
represents the emergent angle of the i
th
lens.
According to the law of the light refraction, we have
n
i
¼
sinθ
i−1
sinθ
i
ð1Þ
where n is the refraction index of optical lens. And then a simplified equation is derived from
multiple optical lenses refraction.
n ¼ n
1
⋅n
2
⋯n
i
¼
sinθ
sinθ
1
⋅
sinθ
1
sinθ
2
⋯
sinθ
i−1
sinθ
i
ð2Þ
From Eq. (2), we can see that n is the product of the refraction index of many glasses, and
different fisheye lenses the refraction index n is usually different. Wang [25] introduced that a
fisheye lens uses at least three optical lenses and commonly five or six lenses. Supposing that the
refractive index of each lens lies in [1.3,1.5], the refraction index interval of a fisheye lens is [2,7].
Therefore, we can obtain an approximate model of the fisheye camera model according to Eq. (2).
As shown in Fig. 3, let O
c
-X
c
Y
c
Z
c
be the camera coordinate system, o-xy be the Fisheye
coordinate system and O
p
-uv be the pixels coordinate system. First of all, a 3D space point Q
is linearly projected to a point q on the unit sphere. Secondly, the point q is mapped on the
fisheye image plane [6, 27]. And θ is the incident angle of the fisheye lens and θ′′ is the
refraction angle.
Considering the simplified formula in the triangle ΔO
c
om, there exists
sinθ
0
¼
r
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
f
2
þ r
2
p
ð3Þ
where r is the distance between the image point and the principal point, and f is the focal
length. From (2) and (3), we obtain
r ¼
f sinθ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
n
2
− sin
2
θ
p
ð4Þ
Fig. 2 The simplified incidence/refraction relations of the fisheye lenses
Multimed Tools Appl (2014) 73:1445–1457 1447
剩余12页未读,继续阅读
2022-07-15 上传
2022-07-15 上传
2023-07-17 上传
2022-07-13 上传
2022-07-15 上传
2021-05-17 上传
2021-02-20 上传
2021-07-16 上传

weixin_38645379
- 粉丝: 7
- 资源: 923
 我的内容管理
展开
我的内容管理
展开







