基于鲁棒PID控制器的电液位置伺服控制系统设计研究
需积分: 9 201 浏览量
更新于2024-08-12
收藏 220KB PDF 举报
"基于鲁棒PID的电液位置伺服控制器的设计研究"
本文研究了基于鲁棒PID控制器的电液位置伺服控制器的设计,针对电液位置伺服系统存在的参数不确定性的特性,提出了一种利用灵敏度函数来确定鲁棒PID控制器参数的整定方法。
PID控制器是控制系统中最常用的控制器之一,具有结构简单、易于实现的特点。但是,PID控制器的参数调整是一个复杂的问题,需要考虑系统的动态特性、稳定性和鲁棒性等多个方面。传统的PID控制器参数调整方法主要有两种:基于幅值和相角裕度的方法和基于根轨迹的方法。然而,这些方法都存在一定的缺陷,例如,基于幅值和相角裕度的方法需要大量的试验数据,而基于根轨迹的方法需要复杂的数学计算。
为了解决这些问题,本文提出了基于灵敏度函数的鲁棒PID控制器参数调整方法。该方法通过对系统开环传递函数奈奎斯特曲线与临界稳定点(-1,j0)点之间距离最大化,来确定各个PID参数。与传统的基于幅值和相角裕度整定的PID控制器进行比较,仿真结果显示,使用灵敏度函数整定出的鲁棒PID控制器,在输入阶跃响应时,控制系统有良好的动态响应性能和鲁棒稳定性能。
本文的主要贡献在于提出了一种新的鲁棒PID控制器参数调整方法,解决了传统方法的缺陷,提高了PID控制器的鲁棒性和控制性能。该方法可以广泛应用于电液位置伺服系统、机电系统、自动化控制系统等领域。
知识点:
1. PID控制器的参数调整方法:包括基于幅值和相角裕度的方法、基于根轨迹的方法和基于灵敏度函数的方法。
2. 鲁棒PID控制器的设计:包括鲁棒PID控制器的结构、参数调整方法和鲁棒性分析。
3. 电液位置伺服系统的控制:包括电液位置伺服系统的特点、控制难点和控制方法。
4. 灵敏度函数的应用:包括灵敏度函数的定义、计算方法和应用场景。
5.奈奎斯特曲线的应用:包括奈奎斯特曲线的定义、计算方法和应用场景。
本文提出了一种新的鲁棒PID控制器参数调整方法,解决了传统方法的缺陷,提高了PID控制器的鲁棒性和控制性能。该方法可以广泛应用于电液位置伺服系统、机电系统、自动化控制系统等领域。
第
32
卷第
2
期
太原科技大学学报
Vo
l.
32
、
No.2
Apr.2011
2011
年
4
月
JOURNAL
OF TAIYUAN UNIVERSITY
OF
SCIENCE
AND
TECHNOLOGY
文章编号
:1673
-2057(2011
)02
-0081
-04
基于鲁棒
PID
的电液位置伺服控制器的设计研究
李梦辉,李虹,刘鹏
(太原科技大学电子信息工程学院,太原
030024)
摘
要:针对电液位置伺服系统存在的参数不确定性的特性,提出了一种利用灵敏反函数来确定鲁
棒
PID
控制器参数的整定方法。这种方法通过对系统开坏传递函数奈奎斯特曲线与临界稳定点(
- 1 •
jO)
点之间距离最大化,来确定各个
PID
参数。与基于幅值与相角裕度确定的
PID
控制器进行比较,仿
真结采显示,使用灵敏度函数整定出的鲁棒
PID
控制器,在输入阶跃响应时,控制系统,有良好的动态响
应性能和鲁棒稳定性能。
关键词:电液位直伺服系统
;PID
控制器;灵敏度;鲁棒性
中图分类号:TP2
02+.1
文献标志码
:A
在工业生产过程中,液压伺服控制系统以其响
应速度快、负载刚度大、控制功率大等独特的优点
在工业领域中得到了广泛的应用
[1]
。但是随着生
产工艺的提高,人们对液压伺服控制系统的控制精
度和鲁棒稳定性的要求越来越高,因此,这就要求
在设计控制器时,提高控制器的控制性能,以满足
工业生产过程中的各项性能指标。
目前,虽然对自适应控制、神经网络控制、滑膜
控制等先进控制器的研究已经取得了很大的成果,
但是,
PID
控制器以其结构简单,在调试过程中容易
实现的特点,仍然占据着
95%
以上的份额。
液压伺服系统具有典型的滞后性和参数的不
确定性的特点,而凹
D
控制器的参数比例
kp
、积分
k;
、微分
kd
→且确定就不能改变,因此,对于控制具
有典型的参数不确定性的液压伺服系统来说,就要
求在设计控制器时,要充分考虑整个液压伺服控制
系统的鲁棒性能,只有满足一定鲁棒性的
PID
控制
器,才能满足更高的控制性能指标。
基于以上分析,提出了一种基于开环传递函数
的灵敏度函数来确定鲁棒
PID
控制器参数的设计
方法,设计出电液位置伺服系统的
PID
控制器,并
收稿日期
:2010-10-13
基金项目:山西省教育厅研究生优秀创新项目
(2
∞
93104
)
与传统的基于幅值和相角裕度整定的凹
D
控制器
进行仿真对比,比较了这两种方法的鲁棒性。
1
问题描述
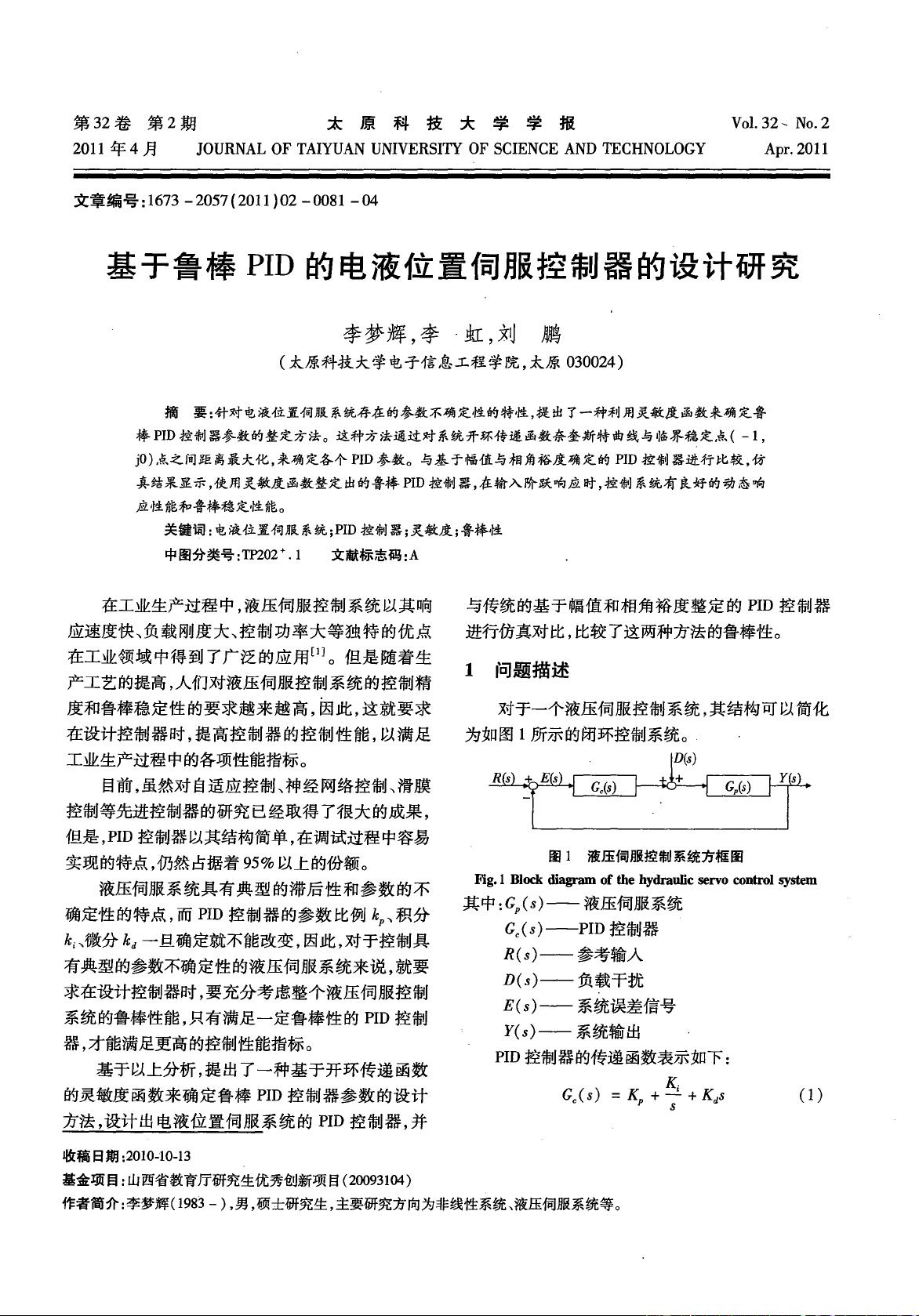
对于一个液压伺服控制系统,其结构可以简化
为如图
1
所示的闭环控制系统。
D(s)
+
固
1
液压伺服控制系统方框图
Fi
g.l
Bh
础
di
咿
amof
也
e
hyl
的叫
ic
servoω
,
otroI
system
其中
:Gp(S)
一-液压伺服系统
Gc(S)
一
-PID
控制器
R(s)
一一参考输人
D(s)
一一负载干扰
E(s)
一一系统误差信号
Y(s)
一一系统输出
PID
控制器的传递函数表示如下:
Gc(s) =
Kp
+
干
+
Kds
(1)
作者简介:李梦辉(1
983
-).男,硕士研究生,主要研究方向为非线性系统、液压伺服系统等。
下载后可阅读完整内容,剩余3页未读,立即下载
2019-07-23 上传
2021-10-09 上传
2021-04-16 上传
2021-05-30 上传
点击了解资源详情
2021-01-27 上传
2021-05-13 上传
2021-07-12 上传
2021-10-06 上传

weixin_38537315
- 粉丝: 6
- 资源: 876
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
