STM32嵌入式CANOpen网络配置指南
需积分: 10 65 浏览量
更新于2024-09-06
收藏 154KB PDF 举报
电子-CANOpenmemento 2.03.pdf 是一份专注于使用单片机/嵌入式STM32-F3/F4/F7/H7系列的CANOpen技术文档,由Francis Dupin在2005年11月发布。CANOpen是一种基于Controller Area Network (CAN)协议的通信标准,主要应用于工业自动化和车辆网络通信领域,旨在实现设备之间的高效、可靠通信。
该文档的核心内容围绕CANOpen协议在STM32微控制器中的应用展开,重点介绍了CAN消息结构。CAN消息由以下几个部分组成:
1. **ID**: CAN消息标识符,通常占用11位,用于唯一标识一条消息。这是通信网络中的关键部分,用于区分不同的数据帧。
2. **rtr**:远程传输请求(Remote Transmit Request)位,用于指示是否为远程发送请求。0表示普通消息,可以携带数据;1表示远程请求,只能发送控制信息,不包含数据。
3. **d1-d7**: 数据段,正常消息可携带0到8个字节的数据。这些字节用来承载实际的应用层信息。
文档中特别提到,所有的数字都是十六进制表示,如果没有明确说明,所有提到的CAN参数应按此格式解析。此外,对于初次接触CANOpen的人来说,文档强调了它并不适合完全不了解CAN工作原理的读者,而是提供了一些测试节点或配置CANOpen网络的实用技巧。
LIVIC(交通参与者与基础设施互动实验室)是INRETS(运输和安全国家研究所)的一部分,LCPC(桥梁和道路中央实验室)也参与了这个项目,位于法国Versailles Satory的Minière路14号。文档提供了一个学习和实践CANOpen的资源,鼓励读者自由传播并报告任何发现的错误或遗漏,以便于作者进行改进。
电子-CANOpenmemento 2.03.pdf是一份实用性很强的技术指南,适合那些想要在STM32平台上实施CANOpen通信的嵌入式开发人员,提供了关于如何构建和维护CANOpen网络的重要信息。
LIVIC – 14, route de la Minière. 78000 Versailles Satory. France
http://www.inrets.fr/ur/livic
3
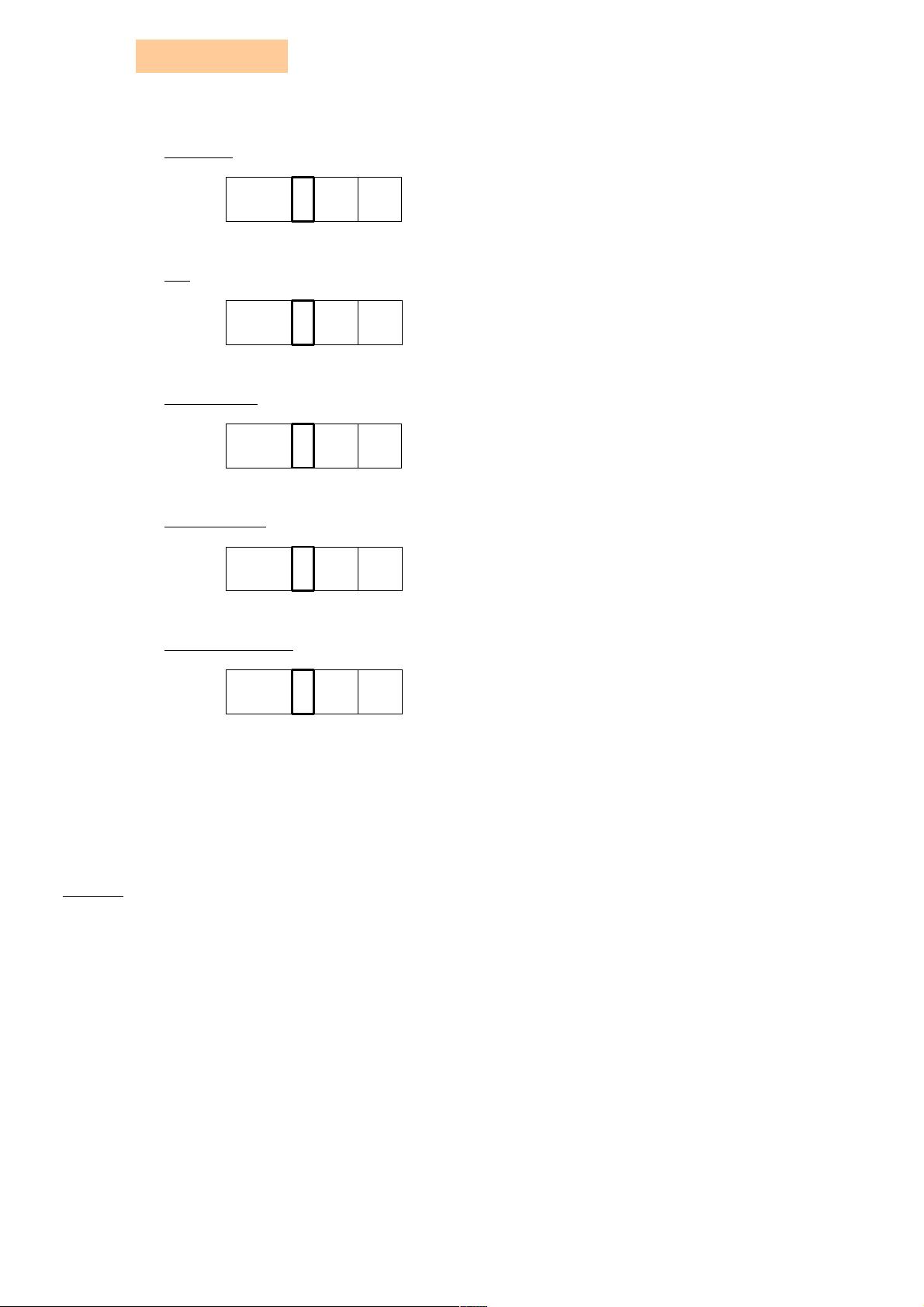
NMT protocol
To put a node in operational mode
000 01
nodeId
To put a node in stop mode
000 02
nodeId
To put a node in pre-operational mode
000 80
nodeId
To put a node in reset-application mode
000 81
nodeId
To put a node in reset-communication mode
000 82
nodeId
Note : To command all the nodes, use nodeId = 00
Examples
To put the node 0x6 in operational mode : 000 01 06
To put all the nodes in pre-operational mode : 000 80 00
0
0
0
0
0
剩余12页未读,继续阅读
2019-07-23 上传
2012-01-31 上传
2023-08-04 上传
2023-07-29 上传
2023-05-24 上传
2023-09-14 上传
2023-05-22 上传
2023-08-04 上传

weixin_38744375
- 粉丝: 373
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- java gui编写的学生成绩管理系统.zip
- Python安装教程基础.zip
- izot-react
- fluentd:Fluentd:统一日志记录层(CNCF下的项目)
- c代码-5的阶乘。
- 塔的东西
- wp.barba.js.fullscreen:一个实现Barba.js.fullscreen(https
- adv-student
- matlab由频域变时域的代码-ece808-smart-water-systems:ece808-智能水系统
- c26-test2
- reldens:Reldens-可以做到-开源MMORPG平台
- springboot整合easypoi实现浏览器自动下载excel文件,一行代码实现,附带完整项目和导出工具
- 基于Java GUI + XML文档 的学生成绩管理系统.zip
- cpp代码-(数组)将两个升序数组合并为一个升序数组
- 树精心
- distrofonts:从Archlinux AURABS源代码树中找到的TTF字体生成PNG图像
