PID调控下的一级倒立摆稳定控制与Matlab仿真
需积分: 20 6 浏览量
更新于2024-09-22
2
收藏 140KB DOC 举报
PID控制的一级倒立摆优化控制课程设计是针对一种非线性、不稳定的一阶直线倒立摆系统进行研究和改进的项目。倒立摆通常由沿直线导轨移动的小车和一端固定的匀质长杆构成,它在自动控制领域具有很高的教学价值,能够直观展示系统稳定性、可控性等关键概念。在这个课程设计中,研究者将倒立摆的数学模型与经典的PID(比例-积分-微分)控制器相结合,这是一种常见的工业控制策略,因其历史悠久且易于理解而广受欢迎。
PID控制器的工作原理是通过调整比例(P)、积分(I)和微分(D)三个参数来实时调整输入信号,以保持系统的输出稳定。在一级倒立摆的控制中,PID控制器旨在抵消系统的非线性、不稳定因素,通过持续地根据当前状态和偏差来调整小车和杆的角度,以维持平衡状态。
该课程设计的核心内容包括以下几个步骤:
1. 建立倒立摆的数学模型,这通常涉及到运动学方程和动力学模型的构建,以便理解和预测系统的动态行为。
2. 设计PID控制器的结构和参数调整策略,这可能涉及到试验、仿真或基于最优控制理论的方法来确定最佳控制参数。
3. 使用MATLAB进行仿真,通过计算机模拟环境来测试PID控制器的有效性,评估其对系统稳定性提升的效果,并可能对不同参数组合下的性能进行比较。
4. 分析仿真结果,讨论控制策略的优点和局限性,以及可能存在的误差来源,这有助于深入理解PID控制器在实际应用中的挑战和优化方向。
5. 最后,总结研究成果,提出可能的改进措施,为后续的研究工作提供参考。
通过这个课程设计,学生不仅可以掌握PID控制器的基本原理和应用,还能锻炼解决复杂系统控制问题的能力,同时对非线性动态系统有更深入的理解。PID控制技术在实际工业应用中广泛存在,因此,研究和优化倒立摆的PID控制对于提升自动化系统的性能具有重要意义。随着控制理论的不断发展,倒立摆作为研究平台的吸引力也只会增加,因为它提供了丰富的实验和理论研究案例。
PID 控制的一级倒立摆优化控制问题
摘要:直线一级倒立摆,是由沿直线导轨运动的小车以及一端固定于小车的匀质长杆组成的非线性的、不
稳定的系统。
本文主要介绍了将一阶倒立摆的数学模型加入 PID 调节来控制它,从而使其成为稳定的系统,并对整个
过程进行了 matlab 仿真和分析。
关键字:一级倒立摆 、PID 调节控制器、matlab 仿真
Abstract:First-order linear inverted pendulum is composed of a trolley, moved along the linear guides, and a
homogeneous pole, one end of which is fixed at the car. However, this system is non-linear and unstable.
This paper describes the first-order mathematical model of inverted pendulum by adding PID regulator to control
it, making it a stable system, and the whole process a matlab simulation and analysis.
Keywords: Linear inverted pendulum、PID controller 、MATLAB simulation
引言:倒立摆系统是理想的自动控制教学实验设备,使用它能全方位的满足自动控制教学的
要求。许多抽象的控制概念如系统稳定性、可控性、系统收敛速度和系统抗干扰能力等,
都可以通过倒立摆直观的表现出来。学习自动控制理论的学生通过倒立摆系统实验来验证
所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。倒
立摆不仅仅是一种优秀的教学实验仪器,同时也是进行控制理论研究的理想实验平台。由
于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控
制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方
法,相关的科研成果在航天科技和机器人学方面获得了广阔的应用。 二十世纪九十年代以
来,更加复杂多种形式的倒立摆系统也成为控制理论研究领域的热点。
PID(比例-积分-微分)控制器作为最早实用化的控制器已有 50 多年历史,现在仍然
是应用最广泛的工业控制器。PID 控制器简单易懂,使用中不需精确的系统模型等先决条
件,因而成为应用最为广泛的控制器。
本次课程设计是一个对由于没有条件进行给定参数整定 PID 的过程,虽然没有条件进
行实际检测,但是通过利用 matlab 数学工具进行仿真,依然有一定的可借鉴性。
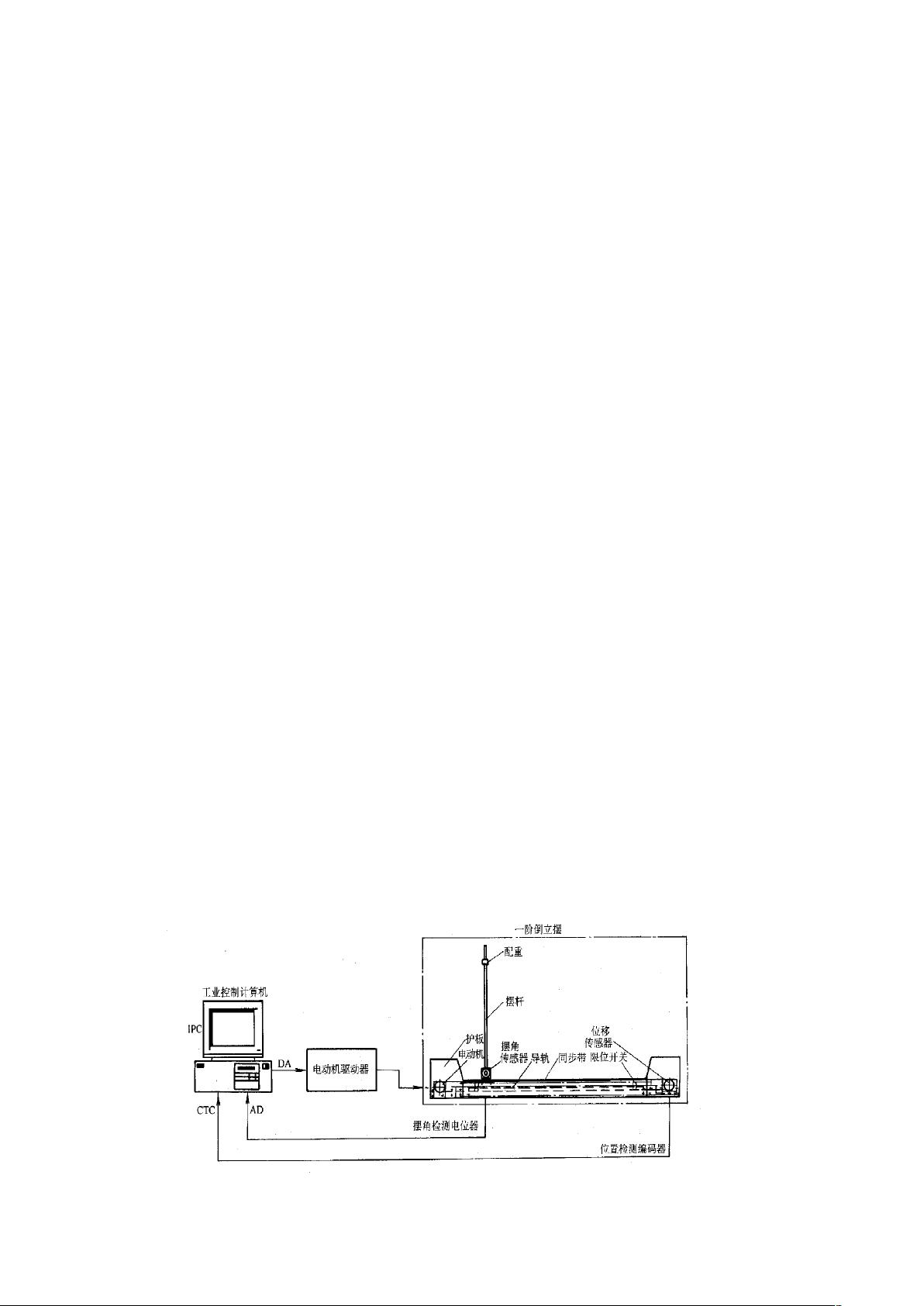
理论基础:一阶倒立摆控制系统及其工作原理:
图2.1 一阶倒立摆控制系统模型
下载后可阅读完整内容,剩余5页未读,立即下载
2021-12-23 上传
2021-09-18 上传
999 浏览量
点击了解资源详情
点击了解资源详情
206 浏览量

streetvip
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- pyuiEdit:一种重组pyui文件的工具
- pump.io:[OBSOLETE] pump.io的前叉,pump.io是具有ActivityStreams API的社交服务器
- BootLoader上位机
- 错误循环
- DaaS:Dajare即服务(ダジャレ判定评価エンジン)
- 数据缩放:将矩阵的值从用户指定的最小值缩放到用户指定的最大值的程序-matlab开发
- NewsSystem:基于Struts + Spring + Hibernate + Bootstrap
- ForecastingChallenge:G-Research预测挑战
- 纷争世界--- jRPG:《最终幻想II》启发的jRPG
- 太原泛华盛世开盘前计划
- i-am-poor-android-Ajinkya-boop:由GitHub Classroom创建的i-am-poor-android-Ajinkya-boop
- sporty-leaderboards
- table表格拖动列
- 酒店装修图纸
- CSE110_Lab2.github.io
- Front-end-exercise
