FANUC机器人与福尼斯焊机以太网通讯指南
需积分: 34 137 浏览量
更新于2024-07-09
收藏 4.1MB PDF 举报
"该文档详细介绍了FANUC机器人与福尼斯焊机之间的以太网通讯配置及步骤,包括硬件需求、软硬件安装以及焊机的通讯设置。"
在工业自动化领域,FANUC机器人和福尼斯焊机的高效协同工作往往需要通过以太网通讯来实现。这篇文档专门探讨了这一主题,旨在帮助用户理解和配置这一过程。
首先,硬件方面的要求是关键。对于B柜体,普通的网线就能满足通讯需求。然而,如果是Mt柜体,则需要使用绞线接法,这种接法通常用于确保数据传输的稳定性和抗干扰能力。福尼斯焊机必须配备以太网卡,这是与FANUC机器人进行通讯的基础。
接下来,进入软硬件安装环节。为了使FANUC机器人与福尼斯焊机能够顺利通信,必须确保在FANUC机器人的控制系统中安装了特定的软件,包括R540“Ethernet I/O Scan”和R653“Fronius Weld EqLib”。这些软件提供了必要的通讯协议和接口,使得机器人能够识别并处理来自焊机的数据。
焊机的通讯设置则分为几个步骤。首先,在开机进入控制启动后,需要将Manufacturer设置为General Purpose,然后进行冷启动以清除焊机的信号状态。在冷启动后再进行一次控制启动,依旧保持Manufacturer为General Purpose,但将Model设定为TS/TPS with Enet,这表明启用以太网通讯功能。最后,需要将Multi-process选项设为ENABLED,这样焊机就准备好了接收和发送数据。
在设置完成后,系统会自动进行焊机信号的分配,并通过对话框询问用户是否采用自动分配方式。自动分配可以简化设置流程,让系统自动为各种信号指派合适的地址,从而减少人为错误。
FANUC机器人与福尼斯焊机的以太网通讯是一个涉及硬件连接、软件配置和焊机参数设定的综合过程。正确执行这些步骤,才能确保两者之间无缝协作,实现精确的焊接作业。这份文档提供了一套详尽的指南,对实际操作具有很高的参考价值。
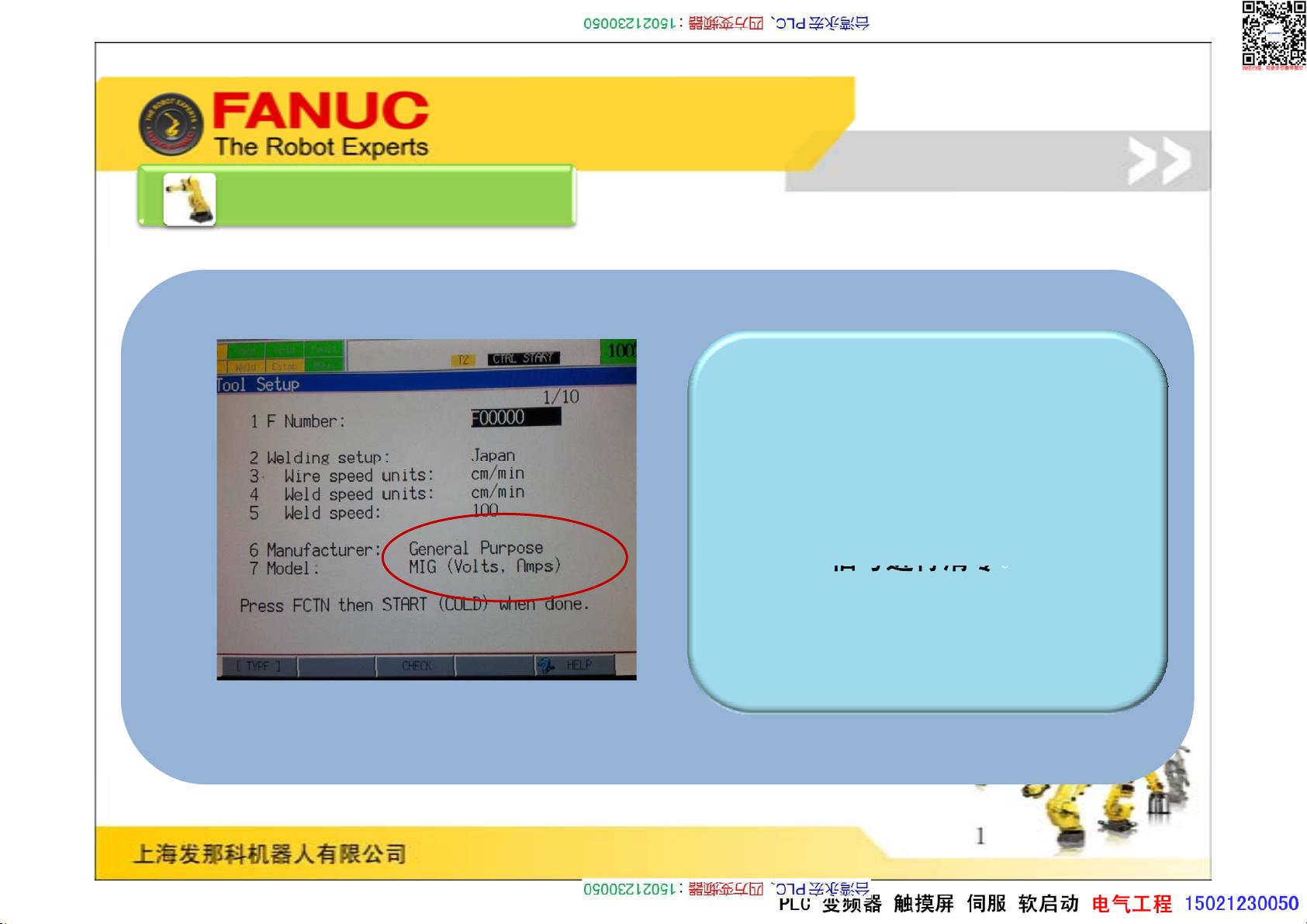
焊机通讯设置(1)
1
开机进入控制启动
,
将
1
、
开机进入控制启动
,
将
Manufacturer选择为General
Purpose,再进行冷启动,对焊机
信号进行清零
。
信号进行清零
。
www.PLCworld.cn
www.PLCworld.cn
www.91HMI.com
www.PLCworld.cn
www.91HMI.com
www.PLCworld.cn
剩余15页未读,继续阅读
2021-10-09 上传
点击了解资源详情
点击了解资源详情
2022-06-30 上传
2022-07-10 上传
2020-12-17 上传

工控老马
- 粉丝: 688
- 资源: 2561
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
