62DOF并联机器人修正位置力控系统设计与关键技术探讨
需积分: 0 106 浏览量
更新于2024-08-05
收藏 474KB PDF 举报
本文主要探讨了62DOF(62个自由度)并联机器人的修正位置ö力控制系统的研究。在当前已有62DOF并联机器人运动控制系统的基础上,作者深入研究了一种新型的力控制策略,旨在提升并联机器人在执行装配和边缘跟踪等任务时的控制质量和性能。并联机器人在实际应用中,尤其是在与环境交互的过程中,引入力和力矩控制至关重要,因为它能增强机器人的灵活性,避免产生过大的接触力矩,从而确保任务的精确执行。
研究的关键在于设计一种修正位置ö力控制系统,这个系统不改变原有位置控制器,而是通过力反馈信号来调节力控制环路。文章详细描述了系统的组成,包括六自由度并联机器人及其运动控制系统,这是一个已经成熟并运行良好的基础。核心部分是LORD六维腕力ö力矩传感器,这是一种高精度的传感器,用于实时测量机器人末端工具与环境的力和力矩,有助于减小滞后并提高控制的准确性。
此外,文章还提到了计算机并行处理系统的应用,这在实现复杂算法和实时处理大量数据方面发挥着重要作用,对于并联机器人的高效控制是必不可少的。仿真研究也是研究过程中的一个重要环节,通过模拟实验验证控制策略的有效性和性能优化。
总结来说,本文针对并联机器人在实际应用中的需求,提出了一种创新的修正位置ö力控制系统设计,旨在通过精确的力控制来改善并联机器人的工作性能,这在提高生产效率、保证产品质量以及降低机器人与环境交互的风险方面具有重要意义。通过计算机并行处理技术和精确传感器的配合,该系统有望为并联机器人的未来发展提供有力支持。
62
DO F
并联机器人修正位置g力控制系统的研究
0
g
孔令富 韩佩富 黄 真 程从权
(
燕山大学机器人中心 秦皇岛 066004
)
郑 涌
(
哈尔滨工业大学机器人研究所 哈尔滨 150001
)
摘 要 该文在 62
DO F
并联机器人运动控制系统的基础上, 研究了一种修正位置g力控制系统,
讨论了系统设计与实现中一些关键性技术问题. 文中内容对改善并联机器人控制质量与性能大有益
处.
关键词 并联机器人, 修正位置g力控制, 计算机并行处理系统, 仿真研究
1 引言
并联机器人是一种具有广泛应用前景的新型机器人
[1 ]
. 目前, 对于并联机器人运动控制的
研究取得了一定的成果, 但从掌握的资料看, 对于并联机器人力控制的研究还尚未见到. 并联
机器人于实际应用中必将遇到诸如装配, 边缘跟踪等与环境接触的任务, 为了使并联机器人能
在约束环境中具有灵活性和避免机器人与环境接触时产生较大的接触力与力矩, 在机器人控
制系统中引入力与力矩控制是必要的. 实现机器人力与力矩控制通常有两种方法
[2 ]
, 本文研究
的是在现有并联机器人运动控制系统的基础上, 参照串联机器人力控制系统的研究成果, 在不
改变机器人位置控制器的前提下实现力外环调节的修正位置g力控制.
2 修正位置g力控制系统的设计
2. 1 系统的组成
由文献[4]可知, 六自由度并联机器人运动控制系统具有较满意的运动性能指标, 以此系
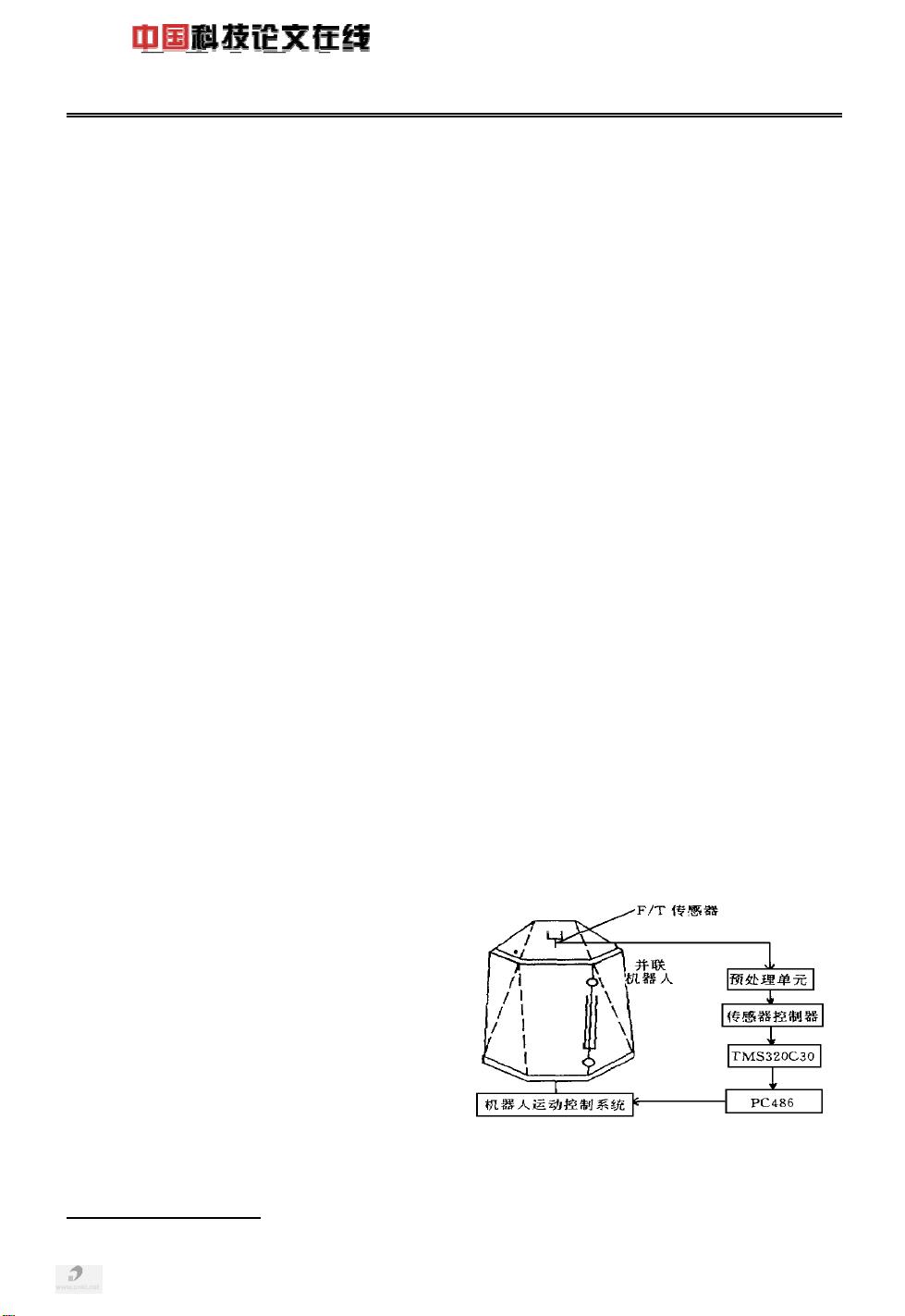
统为基础构造的并联机器人力控制系统组成如图 1 所示.
图 1 并联机器人力控制系统组成
图 1 中力控制系统是在并联机器人双环运
动控制系统基础上, 接收力反馈信号而形成的,
整个力控制系统由 3 部分组成:
(
1
)
六自由度并
联机器人及其运动控制系统, 为已投入运行的
可靠系统
[4 ]
;
(
2
)
LORD
六维腕力g力矩传感器
及其预处理单元, 加之传感控制器.
LORD
腕
力传感器是美国
LORD
公司研制的六维腕力g
力矩传感器, 安装于机器人腕部, 用于测量机器
人末端执行工具与环境的相互作用力. 它实际
上是一种变送器, 用于检测和传送机器人末端工具的力和力矩的作用值. 为了减少滞后和提高
第 20 卷第 4 期
1998 年 7 月
机器人
ROBO T
Vol. 20,N o. 4
July, 1998
g
0 中国科学院沈阳机器人学开放研究实验室基金资助项目. 1997- 05- 12 收稿
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
__________________________________________________________www.paper.edu.cn
下载后可阅读完整内容,剩余5页未读,立即下载

lowsapkj
- 粉丝: 1015
- 资源: 312
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深井潜水泵电缆线接头的密封.rar
- 风险评估方案 和详细评估方法
- stevenjpr
- Accuinsight-1.0.17-py2.py3-none-any.whl.zip
- mipaka
- 网址模板
- WebAppDemo.zip
- Collumned NPR-crx插件
- Add to uStart (by uStart)-crx插件
- Gamers-Systems:所有游戏玩家的应用
- quickcheck:R 的随机测试
- 工作库:由学生完成的项目,为隆德大学LTH的ETSF20课程
- tour-mobile
- Feedly Subscriber-crx插件
- misc
- multiplayer_snake_game
