PMAC控制下的高精度转台双闭环伺服系统设计与调试挑战与解决方案
160 浏览量
更新于2024-08-30
1
收藏 177KB PDF 举报
本文主要探讨了工业电子领域中采用PMAC开放式运动控制器进行高精度转台双闭环伺服系统设计与调试的问题。PMAC,由美国Delta Tau公司开发,是一款功能强大的运动控制器,以其Motorola DSP56001/56002数字信号处理器为基础,支持多轴控制并具备实时多任务处理能力。系统的核心组件包括TURBOPMACⅡ型卡,国内应用相对较少。
在设计阶段,PMAC提供了高度灵活性,支持G代码、C或BASIC语言编程,能独立处理内部程序,执行复杂的伺服环更新和与主计算机的通讯。设计的转台控制系统由PC(作为上位机)、PMAC控制器(作为下位机)、Dynaserv驱动器、高精度旋转工作台(采用无刷直接驱动电机)以及精确的测量与反馈系统构成。其工作原理涉及闭环控制,理论上能够补偿伺服环内的元件误差和运动过程中的误差,从而实现高精度定位和跟踪。
然而,实际应用中,由于机械变形、温度变化、振动等因素的存在,要实现高精度、稳定性和快速动态响应并非易事。文章重点在于解析在PMAC控制转台闭环系统调试中可能遇到的问题,例如参数设置优化、噪声抑制、误差补偿算法调整等,并提出针对性的解决策略,供业界同仁参考和借鉴。这些策略可能包括定期校准设备、改进机械结构、合理设置PID参数、利用PMAC的自诊断功能等,以确保系统的高效运行和长期稳定性。通过深入理解和精细的调试,可以在复杂工业环境中实现高效的高精度控制。
工业电子中的工业电子中的PMAC控制下的高精度转台双闭环伺服系统设计控制下的高精度转台双闭环伺服系统设计
与调试与调试
PMAC 是一个开放式的运动控制器,它有多种型号,系统使用的是TURBO PMACⅡ型卡,该卡在国内的使用不
多。用PMAC控制转台闭环伺服系统,从理论上来讲,伺服环内各元件误差以及运动中造成的误差都可以得到补
偿,因而可以达到很高的跟随精度和定位精度,但由于受机械变形、温度变化、振动及其它因素的影响,要实
现高精度、良好的稳定性和快速的动态响应特性,闭环系统的调试有一定的难度。就PMAC 控制的转台闭环系
统进行调试过程中遇到的几个问题进行分析,并提出解决办法,以供大家借鉴。 1 伺服系统的设计 1.1
PMAC 概述 美国DeltaTau 公司的可编程多轴运动器(PMAC)是世界
PMAC 是一个开放式的运动控制器,它有多种型号,系统使用的是TURBO PMACⅡ型卡,该卡在国内的使用不多。用
PMAC控制转台闭环伺服系统,从理论上来讲,伺服环内各元件误差以及运动中造成的误差都可以得到补偿,因而可以达到很
高的跟随精度和定位精度,但由于受机械变形、温度变化、振动及其它因素的影响,要实现高精度、良好的稳定性和快速的动
态响应特性,闭环系统的调试有一定的难度。就PMAC 控制的转台闭环系统进行调试过程中遇到的几个问题进行分析,并提
出解决办法,以供大家借鉴。
1 伺服系统的设计
1.1 PMAC 概述
美国DeltaTau 公司的可编程多轴运动器(PMAC)是世界上功能强大的运动控制器之一,它借助于Motorola 的
DSP56001/56002 数字信号处理器,可以同时操纵1~8 个轴。而且它还可以自动对任务进行优先等级判别,从而进行实时的
多任务处理,这使得它在处理时间和任务切换这方面大大减轻主机和编程器的负担,提高了整个控制系统的运行速度和控制精
度。PMAC 具有开放平台,不仅可以用G 代码,而且可以用C 或BASIC 语言编程,它能够对存储在它内部的程序进行单独的
运算,执行运动程序、PLC 程序,并可进行伺服环更新,并以串口、总线两种方式与主计算机进行通讯。
1.2 转台控制系统设计
该控制系统由PC(上位机)、PMAC 控制器(下位机)、Dynaserv驱动器、PARK 的高精度旋转工作台、测量与反馈系
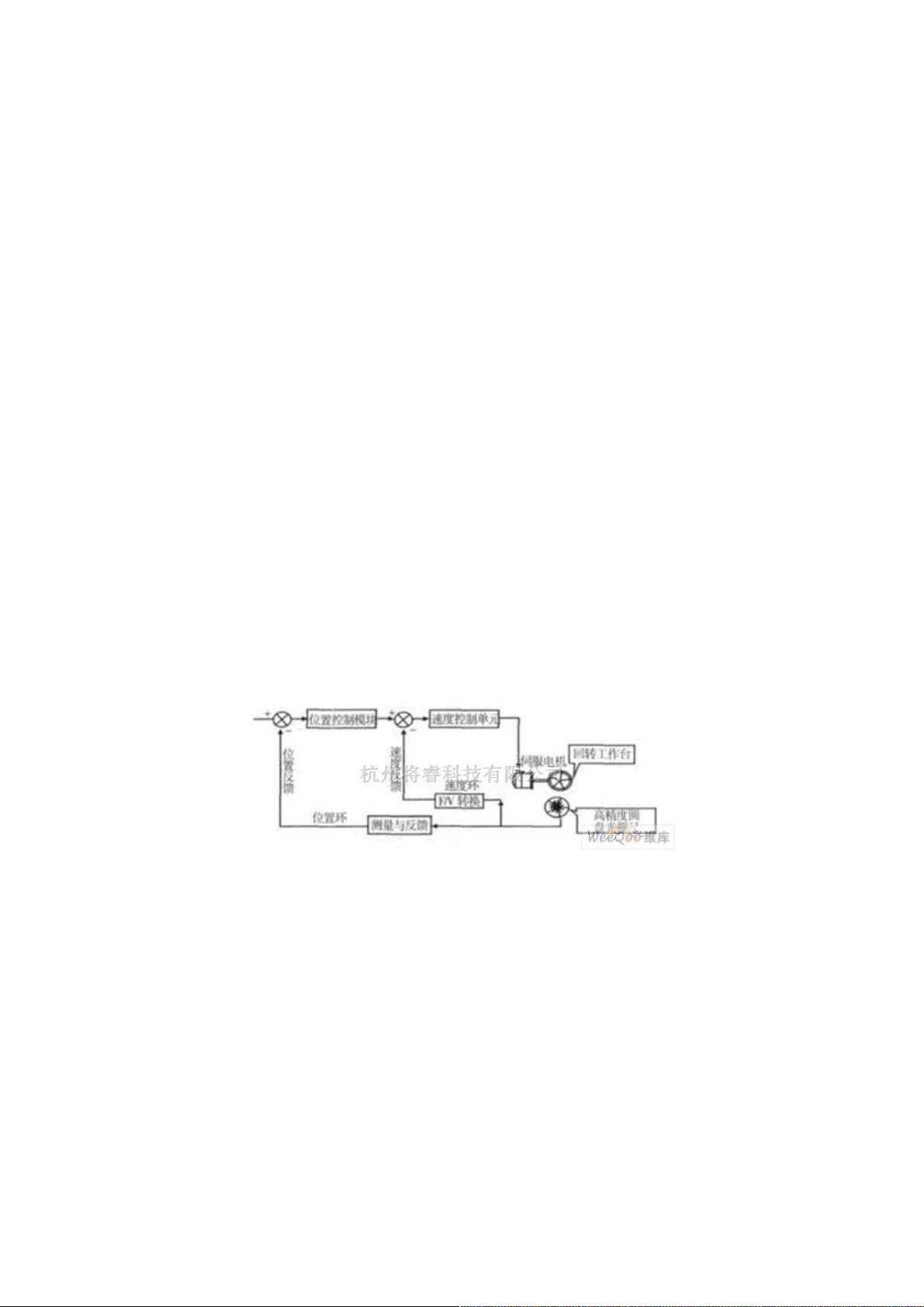
统组成。其控制原理,如图1 所示。PARK 的高精度旋转工作台与一般工作台不同,它的电机是无刷直接驱动电机,回转工作
台的台面是电机的转子,没有了传动机构,这样就减少了传动误差。该系统是一个双闭环系统,由于该系统中执行机构采用的
是直接驱动电机,其双闭环系统不同于通常的双闭环,其速度环和位置环共用圆光栅位置反馈信号,内环是速度环,外环是位
置环。速度环由速度控制单元、F/V 转换、速度反馈电路组成,它可以实现速度恒值控制。位置环由PMAC 中位置控制模块、
速度控制单元、位置检测及位置反馈电路组成。
图1 转台伺服系统结构原理图
由于没有了传动机构,因此安装在转子上的圆光栅所反馈的值既反映了转台的实际位置,又反映了电机的输出,速度环中
该值通过F/V 转换成速度量,F/V 转换是通过计数的频率来转换成模拟电压(一般是以25kHZ/V 的速率转换)。反馈信号是增
量式A/B 相正交脉冲信号。控制转台的是PMACⅡ型卡,系统中的圆盘光栅尺精度高,可达655360 线/转,当PMAC 四倍频
后,其分辨率可达到2621440 脉冲数/转。
2 系统调试
对双闭环系统的调试,不但要对控制卡进行参数设置,而且要对驱动器进行参数设置,系统调试中会遇到很多问题,本节
只就其中几个问题进行分析讨论。
2.1 转台单方向漂移的问题
在完成系统连接后,我们用PMAC 的调试软件Pewin32 进行调试,上电后,转台开始出现单方向漂移的现象:转台沿顺
时针方向以很小的速度移动。在设置了常用的PMAC 参数后,单方向漂移问题仍然存在。
为解决这个问题,我们对有可能的原因一一分析。首先我们怀疑是硬件系统连接引起的,在核对控制线路图、重新检查硬
件连线后该现象仍然存在。然后我们怀疑是驱动器的设置有问题,由于在出厂前其驱动器dynaserv 可能设置了一些参数,为
此,我们用park 自带的调试软件DRVGⅡ进行调试,上电后,转台没有出现单方向漂移的现象。由此可以推断出不是驱动器参
数设置的问题,而确定为PMAC 与转台之间的匹配或PMAC 参数设置的问题。经仔细查找,发现编码器I 变量I7mn6(转台轴
下载后可阅读完整内容,剩余3页未读,立即下载
119 浏览量
2021-08-14 上传
109 浏览量
130 浏览量
2020-11-10 上传
208 浏览量
111 浏览量
136 浏览量

weixin_38500572
- 粉丝: 6
- 资源: 925
 我的内容管理
展开
我的内容管理
展开







最新资源
- CStrAinBP:2 个单元格串的重叠元素。 比 INTERSECT/ISMEMBER/SETDIFF 快 10-20 倍。-matlab开发
- SecKill-System:一个秒杀抢购项目:分别提供MySQL乐观锁,Redis分布锁和ZooKeeper分布锁共3种方案
- rt-thread-code-stm32f103-yf-ufun.rar,yf-ufun STM32F103 是优凡
- Gra_w_zgadywanie_liczb_2
- shuaishuai-book
- KaanBOT:KaanBOT是一款适度有趣的不和谐机器人
- ARFlower:AR花
- 建筑公司项目部施工管理制度汇编(流程图、岗位职责)
- 实现reload按钮效果源码下载
- PDFBookmark-1.0.2-final.zip
- 行间拖拽插件
- SFACC:阿西西圣法兰西斯天主教会加拉迪玛瓦网站
- CAD图块素材之电视背景墙、玄观、书柜详图
- API:GitHub上Viva Wallet开源项目的索引
- chokidar-cli:快速的跨平台cli实用程序,可监视文件系统的更改
- book_project
