AT89C52单片机实现RS422向CAN总线转换详解
104 浏览量
更新于2024-09-04
2
收藏 135KB PDF 举报
本文主要探讨如何利用AT89C52单片机将RS422通信协议转换为CAN总线,以便于在工业环境中实现更高效、可靠的数据传输。RS422虽然在串行通信中有广泛应用,但其传输速率低、距离有限且易受噪声干扰,不适合工业级的长距离、高可靠性的通信需求。CAN总线则以其高速、远距离传输和出色的抗干扰能力在工业自动化、汽车电子等领域占据重要地位。
在硬件设计方面,文章首先介绍了整体架构,AT89C52单片机作为核心处理器,接收来自RS422总线的信号,通过专用的收发器和CAN控制器进行数据处理和转换。为保证系统稳定性,文中提到添加了一个电子看门狗,如X25045,这是一款集成多种功能的单芯片,包括看门狗定时器用于防止死锁,电压监测确保电源稳定,以及E2PROM存储器用于非易失性数据存储,增强了系统的健壮性和抗干扰能力。
软件设计部分,重点在于CAN总线的初始化过程,这是整个系统正确运行的基础。软件需要设置输出控制寄存器,配置CAN控制器的工作模式和参数,确保数据帧的正确发送和接收。此外,还包括错误检测和处理机制,因为CAN总线具有错误检测和循环确认功能,这对于数据的准确传输至关重要。
在具体实现时,需要编写控制程序,确保AT89C52与CAN控制器之间的协调工作,以及与外部设备的通信。这可能涉及到数据帧的构建、错误码的解读以及相应的中断处理。整个过程不仅涉及硬件接口设计,还包含底层驱动程序的编写和系统软件的优化,以满足工业环境中的实时性和准确性要求。
本文详细讲解了如何利用AT89C52单片机作为桥梁,将RS422和CAN总线连接起来,展示了在实际工程中如何通过精心设计和编程来克服两者之间的差异,实现高效、可靠的通信转换,适应工业自动化领域的快速发展。
用用AT89C52单片机实现单片机实现RS422到到CAN总线的转换总线的转换
CAN总线以其高性能、高可靠性及其独特的设计越来越受到人们的重视,并被公认为最有前途的总线之一。本
文主要介绍用AT89C52单片机实现RS422到CAN总线的转换
引言
RS422是串行通讯中应用较广的标准总线。他能很方便地把各种计算机、外部设备、测量仪器有机地连接起来,构成一个测
量、控制系统。但是,他传输速率低、传输距离短并且接口处信号间易产生串扰,因此不能直接应用于工业控制。
CAN总线刚好以其高性能、高可靠性及独特的设计赢得了工业界的高度重视。例如,奔驰S型轿车上采用的就是CAN总线系
统,美国商用车辆制造商们也将注意力转向了CAN总线,美国一些企业已将CAN作为内部总线应用在生产线和机床上。同时,
由于CAN总线可以提供较高的安全性,因此在医疗领域、纺织机械及电梯控制中也得到了广泛应用。可见,实现RS422总线和
CAN总线之间的转换非常有必要。
2硬件设计
2.1总体设计分析
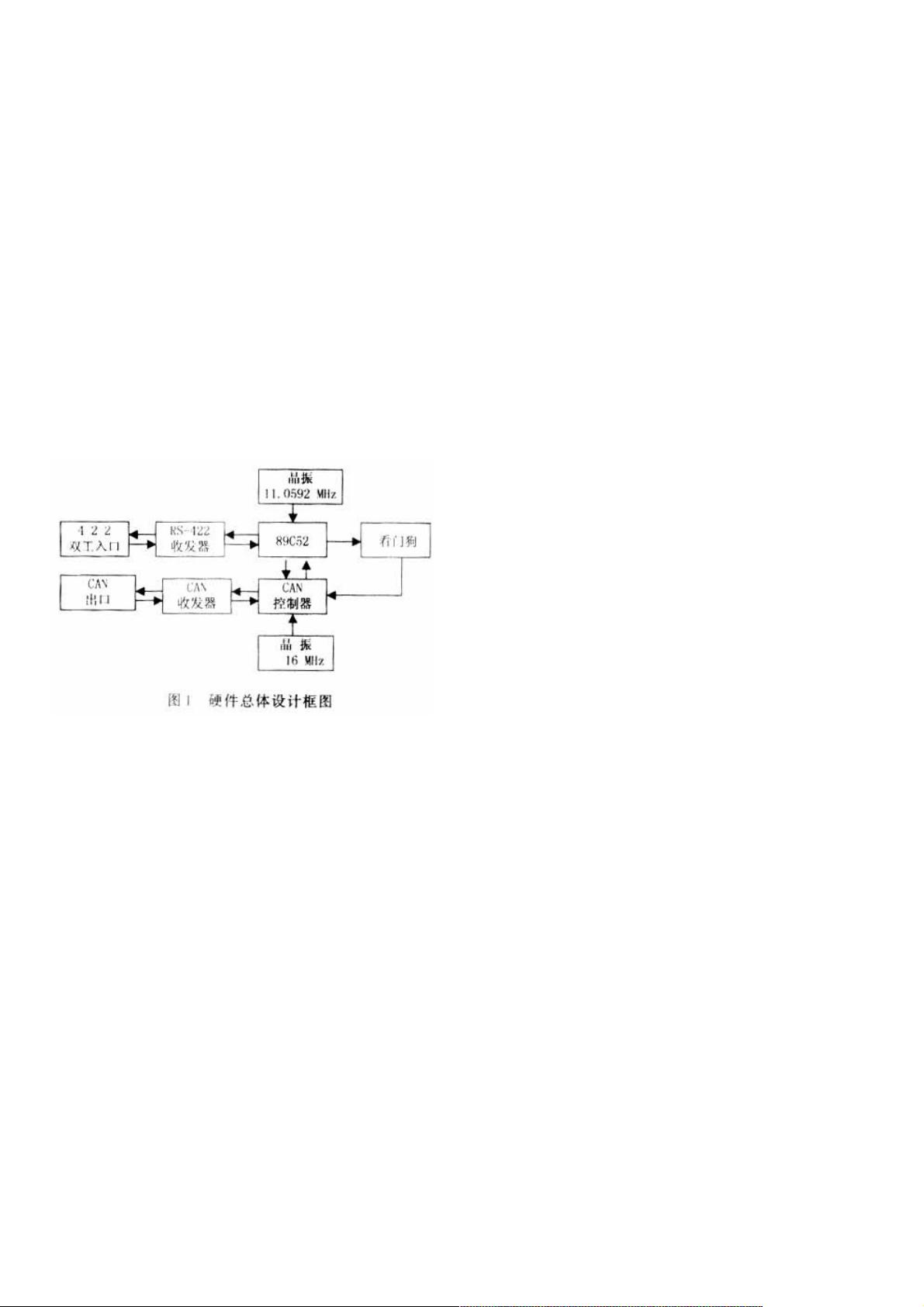
在该系统中,采用AT89C52单片机。RS422总线传输过来的信号经过收发器后进入89C52,处理后送到CAN控制器中,然后
到收发器,最后由CAN出口发出。为了保证系统的安全工作,在CAN控制器上加了一个“看门狗”。总体设计框图如图1所示。
2.2CAN控制器与CPU接口设计
对于CPU来说,CAN控制器是确保双方独立工作的存贮器映象外围设备。CAN控制器与外部CPU的接口是通过控制器接口逻
辑(CIL)实现的, AT89C52 CPU通过将地址总线(AB)和数据总线(DB)连接到CIL上来完成与CAN控制器之间的信息交换,不需
要专门的控制总线(CB),CPU与82C200之间的状态、控制和命令信号的交换在CAN控制器中完成。
2.3电子看门狗设计
为了提高系统的抗干扰性能,采用X25045来做一个电子看门狗。X25045把3种常用的功能:看门狗定时器、电压监视和
E2PROM组合在单个封装之内。这种组合降低了系统成本,并减少了对电路板空间的要求。看门狗定时器对微控制器提供了
独立的保护系统。当系统出现故障时,在可选的超时周期( timeout interval )之后, X25045 看门狗将以 RESET 信号作出
响应。
3软件设计
3.1总体设计思想
CAN总线系统的初始化设计是软件设计的关键,在初始化之前,应设置输出控制寄存器(OCR)的复位请求位为高,再设置
其他寄存器。命令寄存器(CMR)控制缓存器的收发状态;中断寄存器(IR)、状态寄存器(SR)查询82C200的工作状
态;接收码寄存器(ACR)设定工作地址;接收屏蔽寄存器(AMR)设定工作形式;总线定时寄存器(BTR0、BTR1)设定
工作频率、采样频率;输出控制寄存器(OCR)一般为正常输出方式,最后应使复位请求位从高变低,使CAN控制器进入正
常工作状态。主程序框图如图2。
下载后可阅读完整内容,剩余3页未读,立即下载
2019-09-23 上传
2023-06-06 上传
2023-06-06 上传
2023-05-26 上传
2023-07-13 上传
2023-06-12 上传
2023-06-09 上传

weixin_38569219
- 粉丝: 4
- 资源: 984
 我的内容管理
展开
我的内容管理
展开







最新资源
- ExtJS 2.0 入门教程与开发指南
- 基于TMS320F2812的能量回馈调速系统设计
- SIP协议详解:RFC3261与即时消息RFC3428
- DM642与CMOS图像传感器接口设计与实现
- Windows Embedded CE6.0安装与开发环境搭建指南
- Eclipse插件开发入门与实践指南
- IEEE 802.16-2004标准详解:固定无线宽带WiMax技术
- AIX平台上的数据库性能优化实战
- ESXi 4.1全面配置教程:从网络到安全与实用工具详解
- VMware ESXi Installable与vCenter Server 4.1 安装步骤详解
- TI MSP430超低功耗单片机选型与应用指南
- DOS环境下的DEBUG调试工具详细指南
- VMware vCenter Converter 4.2 安装与管理实战指南
- HP QTP与QC结合构建业务组件自动化测试框架
- JsEclipse安装配置全攻略
- Daubechies小波构造及MATLAB实现
