圆柱物体360°全景成像装置设计:简化结构与高质量解决方案
166 浏览量
更新于2024-08-31
1
收藏 5.58MB PDF 举报
本文介绍了一种针对圆柱物体的360°全景成像装置设计方法,主要应用于圆柱物体的外观视觉检测。该装置的设计核心在于利用单视点约束来确定反射镜的形状,确保其能够实现全方位覆盖并满足特定圆柱体尺寸下的成像需求。设计过程中,作者考虑了关键的光学参数,如相机的景深、分辨率和视场角,通过优化这些参数,实现了系统分辨率超过相机原始分辨率80%的最优镜面设计。
光学设计软件在这个过程中起到了关键作用,它被用来进行装置的仿真,评估和比较不同的设计方案,确保最终的成像质量达到高标准。该装置设计强调了系统结构的简化和成本效益,其成像质量高且畸变小,显著优于传统圆柱物体侧面360°成像设备,后者通常具有复杂结构和高昂的价格。
设计的全景成像装置不仅提高了机器视觉对柱状物体侧面的检测能力,还提供了一种实用的成像装置和镜面设计方法,对于工业生产中的质量控制、机器人导航以及自动化检测等领域具有实际应用价值。文章的关键点集中在光学器件、全景成像技术、圆柱物体特性和单视点约束的结合上,这在光学工程和计算机视觉研究领域具有一定的理论和实践意义。
中图分类号TP23表明了这篇论文属于光学工程和技术的范畴,文献标识码A则表明其是学术性文章,DOI:10.3788/AOS201535.0923002是国际标准数字对象唯一标识符,用于在线引用和追踪文章。
这种设计方法为解决圆柱物体全景成像问题提供了一种创新且经济的解决方案,有助于提升工业自动化领域的效率和精确度。
光 学 学 报
0923002-
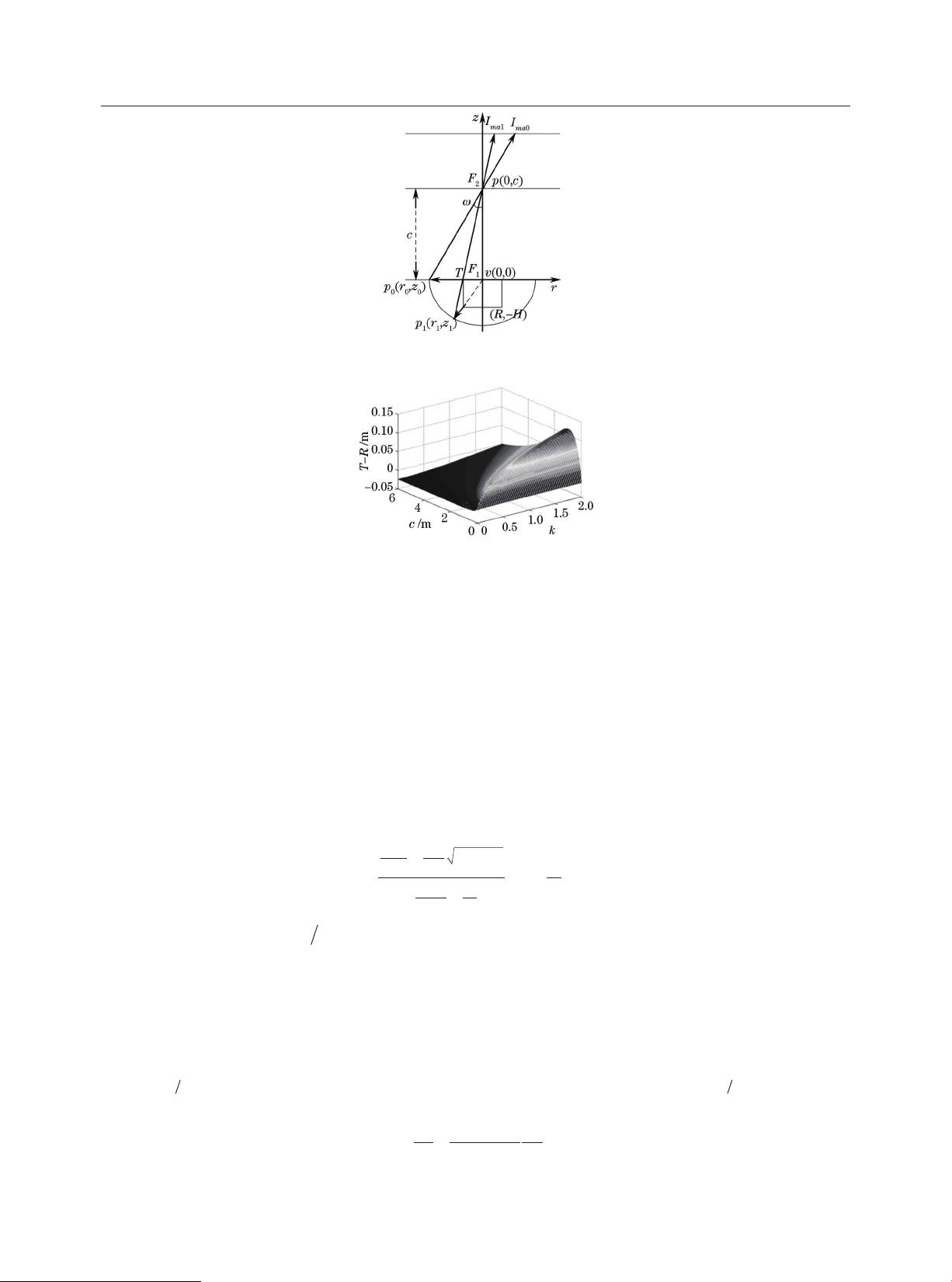
图 2 全景成像模型
Fig.2 Model of panoramic imaging system
图 3 随着参数 c 和 k 增大, 圆柱体侧面完全成像约束 T-R 变化三维图
Fig.3 3D coordinate figure of change of the constraint parameters T-R for side of cylinder entirely imaging,
as increasing with the parameters c and k
2.1.1 圆柱体侧面完全成像约束
首先要求圆柱体侧面完全成像,圆柱体侧面物点的主光线(反向延长线都经过焦点
F
1
)经镜面反射到达
相机镜头中心然后成像。由于圆柱体表面最上端的物点的主光线是通过横轴的镜面点
p
0
( )
r
0
,z
0
反射成像为
I
ma0
,最 下端的 物点 经镜 面点 p
1
( )
r
1
,z
1
反射 成像 为 I
ma1
,圆 柱体其 他物 点通 过 p
1
( )
r
1
,z
1
与
p
0
( )
0, z
0
两点 间的 镜面
反射成像在 I
ma1
与 I
ma0
之间。圆柱体侧面物点的主光线经镜面点反射的反射光线可能会被圆柱体本身遮挡,
当圆柱体最下端的物点的反射光线不被遮挡时,由几何关系可知其他反射光线就不会被遮挡。圆柱体侧面
最下端的物点的反射光线与圆柱体上底面所在平面的交点距离圆柱体上底面中心的距离为
T
,当
T
大于圆
柱体半径
R
时,反射光 线不 会被遮挡。 所以 只要
||
T ≥ R
同时
p
0
点到
p
1
点间镜面存 在,可使圆柱体 侧面 完
全成像。根据图 2 中椭圆参数和圆柱体尺寸,经过几何关系计算得到 p
1
( )
r
1
,z
1
点坐标值为
r
1
=
Hc
a
2
R
-
2
Ra
H
2
+ R
2
2
æ
è
ç
ö
ø
÷
H
2
R
2
a
2
+
1
b
2
,
z
1
=
H
R
r
1
, (2)
从而可以计算出阈值 T =
( )
c·r
1
( )
c - z
1
。
当
R = 0.025 m
,
H = 0.06 m
时,随着参数 c 和 k 逐渐增大圆柱体侧面完全成像约束
T - R
变化三维图可以看
出,如图 3 所示,随着
k
从 0 到 2 变化,
c
从 0 到 6 变化过程中,当
0.07 < c < 6
时,存在 k 使得
||
T ≥ R
成立。在
c
取
值一定时,随着 k 的增大,
T - R
的值是逐渐增大的。k 取值一定时,随着
c
的增大,
T - R
的值先增大,后减小。
2.1.2 分辨率约束
全景成像系统的分辨率越高,成像越清晰。普通相机的分辨率是指,成像面积
dA
与其所对应的立体角
dw 之比
dA dω
,全景成像系统的分辨率是成像面积
dA
与物点发出光的立体角
dα
之比
dA dα
,如图 4 所示,
全景成像系统的分辨率
[10]
为
dA
dα
=
r
2
+ z
2
( )
c - z
2
+ r
2
dA
dω
, (3)
3
剩余10页未读,继续阅读
1607 浏览量
433 浏览量
2021-05-19 上传
2024-11-10 上传
425 浏览量
132 浏览量
119 浏览量
2021-09-10 上传
105 浏览量

weixin_38698174
- 粉丝: 3
- 资源: 980
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#窗体编程-----------.doc
- linux 内存寻址
- 计算机的常用网络命令
- 计算机组成原理与系统结构实验教程
- Liunx文件系统基本目录介绍说明
- Linux必学60个命令文件处理
- 8101E 安装说明
- SQL2008 Upgrade Technical Reference Guide
- DIV+CSS布局大全
- BTS3900WCDMA硬件安装指南
- C#教程(PDF格式)
- 高等代数各章节课件多项式.行列式.线性方程等等
- GPU_Programming_基于GPU编程的中文文档
- 海量数据访问——示例(C++)
- flexflexflexflexflexflex
- 长波授时系统相位跟踪点检测的数字化研究
