构建低成本平面激光距离传感器:3D扫描技术新突破
需积分: 10 69 浏览量
更新于2024-09-12
3
收藏 325KB PDF 举报
"本文介绍了一种紧凑型平面激光距离传感器(LDS),该传感器具有与当前激光扫描仪相当的能力:在6米范围内精度为3厘米,采集频率为10Hz,并且在整个360度扫描中具有1度的分辨率。设备的构建成本使用现成电子元件和定制机械工具,低于30美元。"
在移动机器人领域,3D扫描技术是一种至关重要的技术,特别是在室内导航、建图、定位和避障任务中。OpenCV是一个广泛使用的计算机视觉库,它提供了多种处理图像和进行3D重建的方法。本篇文章可能详细阐述了如何利用OpenCV实现一个低成本、高效的3D扫描系统。
首先,文章提到了传统的激光测距传感器(LDS)在室内和室外移动机器人中的应用,因为它们能提供物体视场内的距离信息,这是其他传感器如摄像头或超声波传感器所无法比拟的。然而,这些传感器的成本和功耗限制了它们在消费级机器人平台上的广泛应用。
文章介绍的紧凑型平面激光距离传感器通过优化设计和采用现成电子元件,降低了设备成本,使得3D扫描技术更有可能被集成到低预算的家用机器人中。该传感器的性能指标,如3厘米的精度、10Hz的采样率和1度的扫描分辨率,表明它能够提供高质量的3D数据,用于构建精确的环境地图。
在OpenCV框架下实现3D扫描,通常会涉及以下步骤:
1. 数据获取:使用LDS获取连续的2D距离测量值,这些数据代表了机器人周围环境的二维轮廓。
2. 扫描旋转同步:确保传感器旋转时的数据同步,以便将每个位置的测量值与相应的角度关联起来。
3. 三角测量:结合传感器的旋转角度和2D扫描结果,使用三角测量方法计算每个测量点的三维坐标。
4. 点云构建:将所有三维坐标点组合成一个点云模型,这个模型可以直观地展示环境的3D结构。
5. 地图构建与导航:点云数据可以用于创建机器人可导航的地图,包括障碍物的位置和形状,这对于避障和路径规划至关重要。
OpenCV库提供了多种功能,如`findChessboardCorners`用于校准相机,`solvePnP`用于三角测量,以及`PCL`(Point Cloud Library)模块来处理点云数据。通过这些工具,开发者可以构建一个完整的3D扫描系统,不仅能够获取环境的详细信息,还能实现自主导航和实时避障。
在实际应用中,可能还会涉及到误差修正、运动补偿、数据融合(例如与RGB-D相机数据结合)等高级技术,以提高3D扫描的准确性和鲁棒性。这篇文章为使用OpenCV实现低成本3D扫描提供了实用的指导,对于希望开发家用机器人的工程师和研究者来说,是一份宝贵的技术资源。
1
Abstract – Many indoor robotics systems use laser
rangefinders as their primary sensor for mapping,
localization, and obstacle avoidance. The cost and power of
such systems is a major roadblock to the deployment of low-
cost, efficient consumer robot platforms for home use. In
this paper, we describe a compact, planar laser distance
sensor (LDS) that has capabilities comparable to current
laser scanners: 3 cm accuracy out to 6 m, 10 Hz acquisition,
and 1 degree resolution over a full 360 degree scan. The
build cost of this device, using COTS electronics and custom
mechanical tooling, is under $30.
I. INTRODUCTION
One of the most common tasks for mobile robots is to
make a map and navigate in an environment. To do so,
the robot needs to sense its environment in an efficient
way, looking out to some distance to find obstacles and
build a map that is useful for performing tasks such as
vacuuming or delivery.
While there are many sensors that could be used, laser
distance sensors are currently the standard sensor in
indoor and outdoor mobile robots. The main reason is the
utility of the data: an LDS returns distance to objects in its
field of view, unlike (for example) vision sensors, which
need complicated and error-prone processing before
distances are measured. And unlike other distance sensors
such as sonars or IR sensors, an LDS is capable of fine
angular and distance resolution, realtime behavior
(hundreds or thousands of point measurements per
second), and low false positive and negative rates.
Efficient algorithms exist for mapping and localization
using LDS scans [5][8].
While LDS devices are ubiquitous in research robotics,
their high cost has kept them from appearing in consumer
robotics such as robot floor cleaners. The Electrolux
Trilobite, one of the only cleaners to make a map, relies
on sonar sensors [13].
2
The barrier to using LDS
technology is the cost. The two most common devices,
the SICK LMS 200 [1] and the Hokuyo URG-04LX [1],
cost an order of magnitude more than the simplest robot
Manuscript received September 14, 2007. Revised February 4, 2008.
K. Konolige is with SRI International, Menlo Park, CA 94025 USA
(phone: 650 859-2788; fax: 650 859-3735; e-mail: konolige@ai.sri.com).
J. Augenbraun, N. Donaldson, C. Fiebig, and P. Shah are with Neato
Robotics, Menlo Park, CA 94025 USA (e-mail: joe, nick, charles,
pankaj@neato.com).
2
The Samsung VC-RP30W apparently makes a map, but there are no
details available on how it does this.
cleaners.
In this paper we describe a compact, low-cost LDS that
is as capable as standard LDS devices, yet is being
manufactured for a fraction of their cost: the Revo LDS.
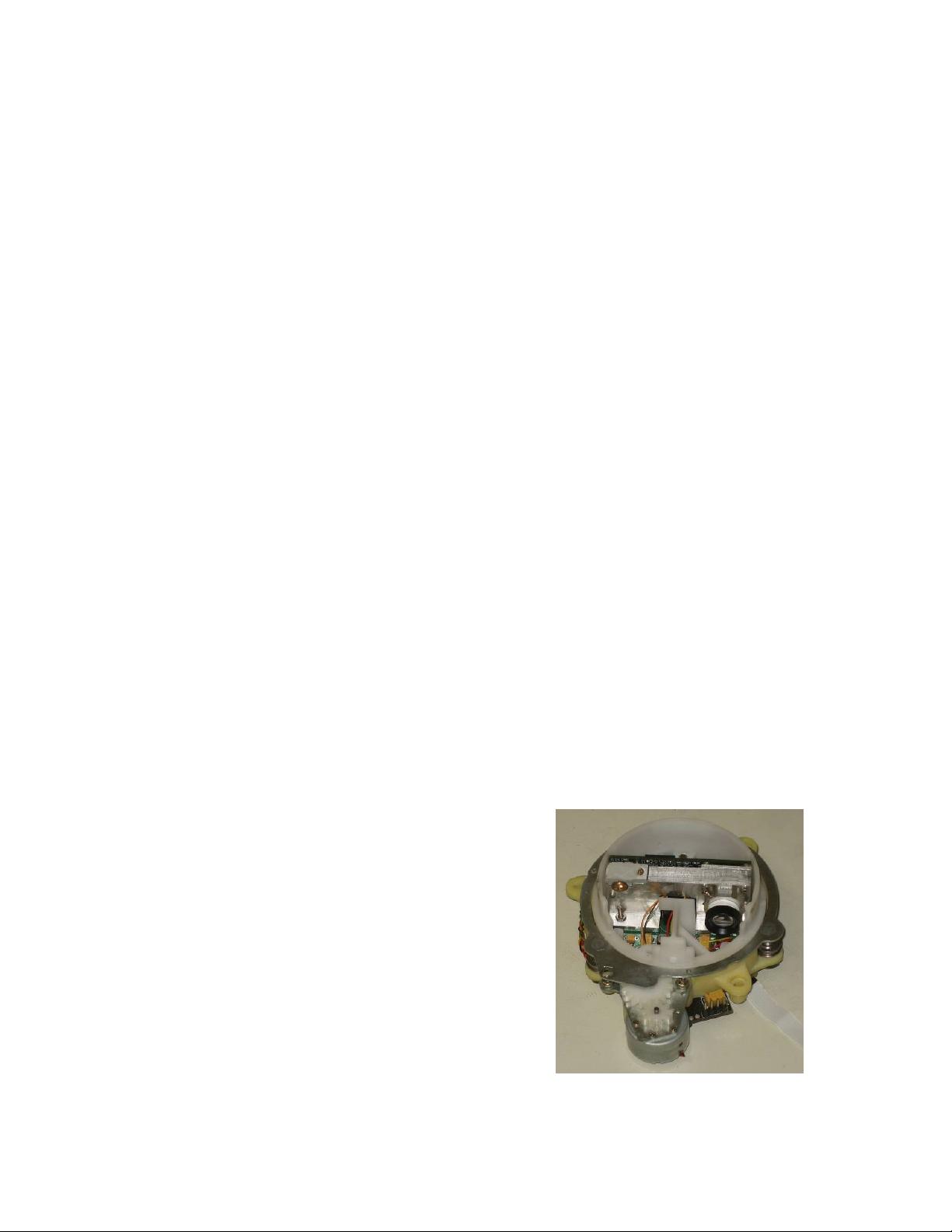
Figure I-1 shows the prototype Revo with its cover
removed. It has the following characteristics:
1. Eye-safe (Class I or II).
2. Works under standard indoor lighting conditions,
and some outdoor conditions.
3. Measures a full 360 degree planar scan.
4. Has a range from 0.2m to 6m.
5. High resolution: range error < 3 cm at 6 m, angular
resolution of 1 degree.
6. 4000 readings per second (scans up to 10 Hz)
7. Small size, low power (< 2W)
8. Standard, commercially-available components.
9. Low cost: $30 cost to build.
These characteristics make the Revo suitable for consumer
products, and open the way for high-performance, low-
cost mobile robots. Although all of the Revo technologies
have been used in other devices, to date no-one has
realized that they could be combined to make a low-cost,
high-performance sensor. Achieving the above criteria
required innovations in design, algorithms, and
integration. The key elements of the Revo are –
• A compact, rigid point-beam triangulation module
incorporating laser, imager, and electronics. With a
low-cost CMOS imager and a DSP for subpixel
interpolation, we get good range resolution out to 6 m
Figure I-1 Revo LDS. Approximate width is 10cm. Round carrier
spins, holds optical module with laser dot module, imager, and lens.
A Low-Cost Laser Distance Sensor
Kurt Konolige, Joseph Augenbraun, Nick Donaldson, Charles Fiebig, and Pankaj Shah
2008 IEEE International Conference on
Robotics and Automation
Pasadena, CA, USA, May 19-23, 2008
978-1-4244-1647-9/08/$25.00 ©2008 IEEE. 3002
Authorized licensed use limited to: Guangdong Univ of Tech. Downloaded on January 19, 2010 at 08:56 from IEEE Xplore. Restrictions apply.
下载后可阅读完整内容,剩余6页未读,立即下载
2021-01-06 上传
276 浏览量
144 浏览量
2021-05-08 上传
2015-08-17 上传
177 浏览量
2021-09-29 上传

zhaojinpeng111
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- SciChart.JS.Examples
- 基于Python+Flask的学员管理系统-毕业设计源码+使用文档(高分优秀项目).zip
- 基于MATLAB建立的雾霭图像去雾系统源码.zip
- Neuron:Swift的神经网络库
- LoginApp:登录应用程序(Spring MVC + Security + Hibernate + etc...)
- 基于Python+Flask的玩具电子商务网站-毕业设计源码+使用文档(高分优秀项目).zip
- Advanced_Descriptors-2.1.0-cp35-cp35m-manylinux1_x86_64.whl.zip
- 【WordPress插件】2022年最新版完整功能demo+插件.zip
- MyFirstProject:MNL项目
- 行业资料-电子功用-光记录设备的定时控制电路的说明分析.rar
- node-fetch-cookies:添加对 cookie-jar 支持的节点获取包装器
- windows2012r2-packer:一个打包器项目,专注于构建Windows 2012 R2的Vagrant框
- 基于Python+Flask的订货系统简单实现-毕业设计源码+使用文档(高分优秀项目).zip
- 行业资料-电子功用-光纤多路传像的图像光电扫描技术的介绍分析.rar
- CANBUS总线抓包工具CANTest-Setup-V2.34.zip
- touchpoint-kit-ios
