Matlab摄像机标定工具箱详解
需积分: 18 74 浏览量
更新于2024-07-20
1
收藏 6.68MB DOC 举报
"这篇文档是关于使用Matlab摄像机标定工具箱进行相机检校的说明,涵盖了工具箱的下载、安装以及标定过程中的关键步骤和技术细节。"
在计算机视觉领域,相机检校是至关重要的一个环节,它用于校正相机的几何失真和获取相机的内在参数。Matlab提供了摄像机标定工具箱,便于用户进行这一过程。这个工具箱可以从Caltech的官方网站下载,链接为<http://www.vision.caltech.edu/bouguetj/calib_doc/download/index.html>,并附有详细的说明文档<http://www.vision.caltech.edu/bouguetj/calib_doc/>。
安装过程相对简单,只需将下载的`toolbox_calib.zip`文件解压,并将解压得到的`toolbox_calib`目录复制到Matlab的工作路径下。接下来,需要采集一组由已知几何形状(如棋盘格)的图像,这些图像应当统一命名并放置在工具箱目录中,以便工具箱能够识别和处理。
标定模型主要关注相机的内参数,包括Brown畸变模型。该模型用公式(1-1)和(1-2)表示,其中(u, v)表示图像坐标,(xc, yc, zc)表示三维空间中的点坐标,kx和ky是焦距相关的放大系数,ks表示因摄像机轴线不垂直导致的耦合放大系数,(u0, v0)是主点坐标,(xc1, yc1)是归一化坐标。模型还包括径向畸变系数kc1, kc2, kc3, kc4, kc5以及切向畸变系数kc3和kc4,它们用于描述实际成像与理想情况的偏离。
在进行标定时,用户需要在Matlab环境中将当前目录设定为包含标定工具箱的`toolbox_calib`目录。运行`calib_gui`指令会弹出一个选择窗口,提供两种内存使用模式:"Standard"和"Memory efficient"。前者一次性加载所有图像到内存,适合内存充足的情况;后者则按需逐个加载,适用于内存有限的环境。选择相应的模式后,用户可以按照标定工具箱的操作面板进行下一步的图像处理和参数估计。
通过这个工具箱,用户可以计算出相机的内参数矩阵,包括焦距、主点坐标以及畸变系数,从而对相机的图像进行校正,提高图像质量和后续计算机视觉应用的准确性。Matlab摄像机标定工具箱为相机检校提供了一个强大且易用的平台,使得非专业人士也能顺利完成复杂的相机标定任务。
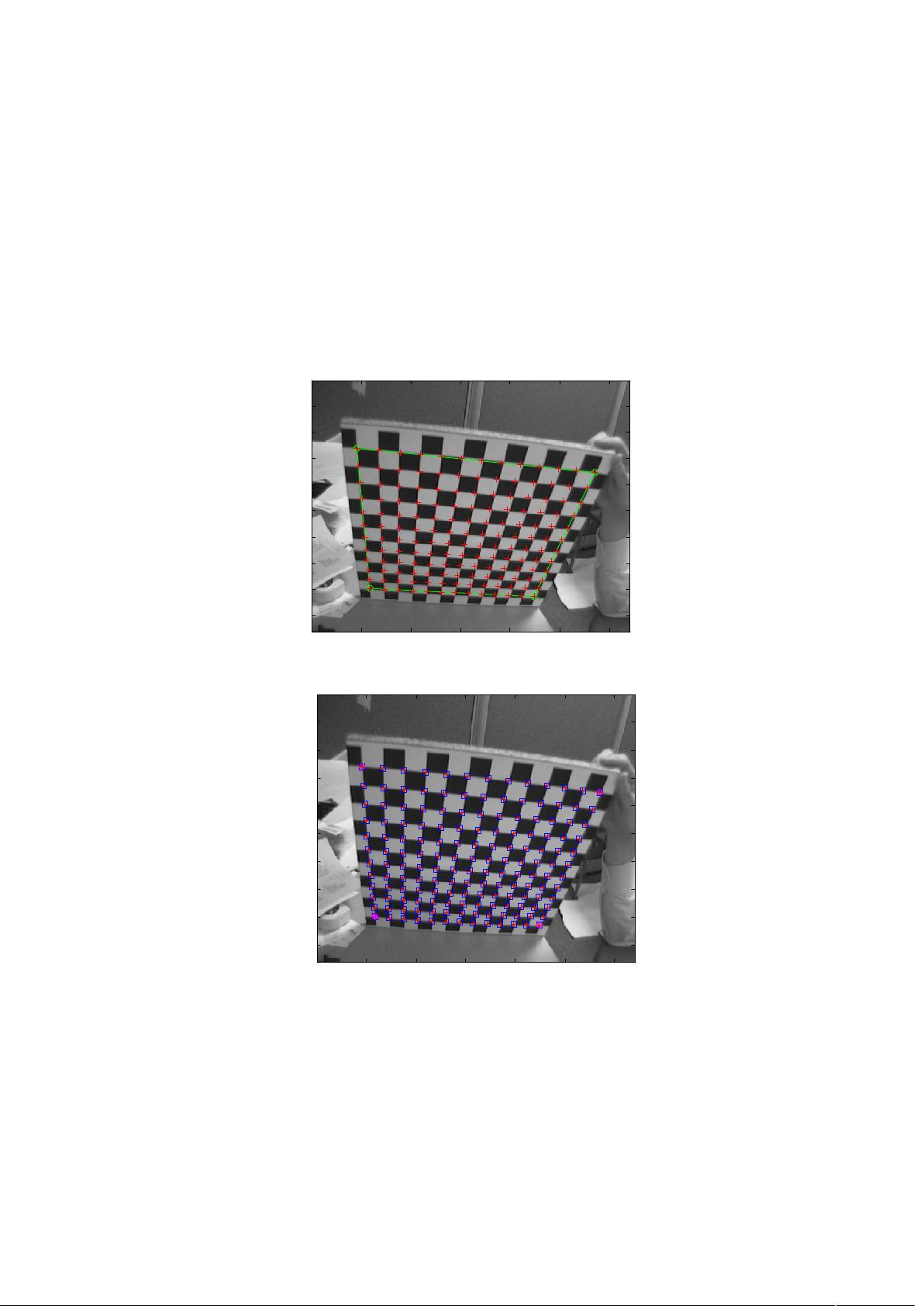
角点提取区域的窗口尺寸为 11x11 像素,未输入畸变初始值,此时图像 Image6 的角点提取
结果如图 4 所示。图 4(a)只标出了待提取角点的位置,图 4(b)标出了角点提取区域窗口和
提取出的角点。从图 4 中可以发现,图 4(a)中的十字标记位置与角点具有明显偏差,但在
角点附近;图 4(b)中的每个角点提取区域窗口包含了角点,表示角点提取结果的十字标记
位置与角点位置具有很好的吻合度。同样在 m=5,n=5 时,未输入畸变初始值,但通过鼠
标点击设定棋盘格靶标的选定区域时,所形成的四边形的边与棋盘格靶标的网格线成较大
夹角,此时图像 Image1 的角点提取结果如图 5 所示。从图 5 中可以发现,图 5(a)中的十字
标记位置与角点具有明显偏差,部分十字标记远离角点;图 5(b)中的很多角点提取区域窗
口没有包含角点,表示角点提取结果的十字标记位置并不在角点位置,说明角点提取存在
错误。
X
Y
O
The red crosses should be close to the image corners
100 200 300 400 500 600
50
100
150
200
250
300
350
400
450
(a)
O
dX
dY
Xc (in camera frame)
Yc (in camera frame)
Extracted corners
100 200 300 400 500 600
50
100
150
200
250
300
350
400
450
(b)
图 4 合适的靶标选定区域与角点提取结果,(a) 靶标选定区域,(b) 角点提取结果
(3) 内参数标定
对用于标定的每一幅靶标图像进行角点提取后,在图 2 所示的标定工具箱操作面板点
击“Calibration”键,即可完成摄像机的内参数标定。
内参数标定时,Matlab 工具箱首先进行初始化,即将图像中心点坐标作为主点坐标的
初始值,采用平面靶标网格的消失点估计出摄像机的内参数作为内参数的初始值,畸变初
4
剩余17页未读,继续阅读
403 浏览量
2024-05-22 上传
2023-08-25 上传
2021-10-21 上传
2021-10-06 上传

Clerrrrrr
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Z3-SMT解决Cross-Sum Sudoku游戏的Python实践指南
- AZENUI: 响应式HTML5页面模板解决方案
- ASP技术实现的简易网上影音系统
- 2015NBA总决赛免费直播神器:PotPlayer绿色版
- 打造全兼容纯js下拉框组件,支持搜索与多浏览器
- 编程专家的dotfiles:MacOS配置与效率技巧
- 利用jquery.jparallax打造震撼图片视差特效
- 基于ASP和Access的简易工资查询系统开发
- Playcolor插件:轻松获取桌面颜色代码
- S7-1200控制与PID编程范例教程
- OxigenoPeru.info:利马氧气内容网站
- PC版太空侵略者克隆:经典游戏再现
- 学子网视V1.1:官方免费安装版的网络电视革命
- 鸟哥私房菜Linux入门视频及配套讲义下载
- ASP与Access打造简易工资管理系统
- SPCOMM_DELPHI串口工具源码深度解析
