智能体Petri网在多机器人养老照顾协调中的应用
版权申诉
6 浏览量
更新于2024-06-27
收藏 3.03MB DOCX 举报
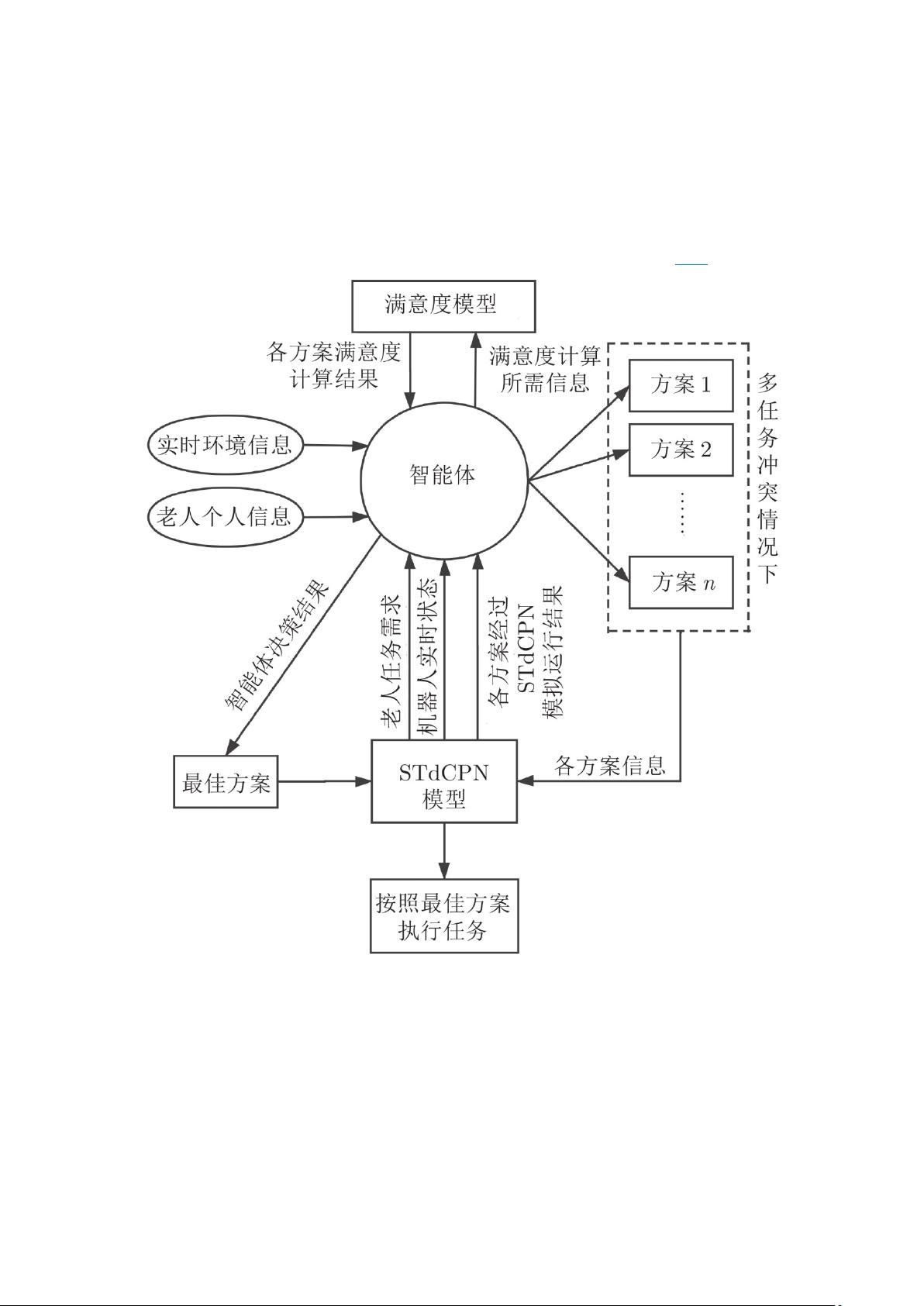
"本文探讨了智能体Petri网融合的多机器人-多任务协调框架在养老护理中的应用,旨在利用服务型机器人协助照顾失能老人,以缓解人力成本上升和老龄化加剧带来的压力。Petri网作为一种强大的数学工具,被用来描述和协调多机器人系统的并发、顺序和同步行为。文献中提到了两种Petri网的应用,但未充分考虑被操作对象(如老人)的状态和交互。本文的创新之处在于构建了一个包含机器人和老人状态、动作流程以及交互过程的综合模型,利用时延Petri网进行时间预测,颜色Petri网对资源进行分类,以更好地应对多机器人和多位老人的协调问题。尽管如此,如何避免老人之间的工作干扰和灵活调整任务执行权限仍然是挑战,为此,本文提出了将智能体的概念融入Petri网模型,以解决这些问题。"
本文的核心知识点包括:
1. **服务型机器人在养老护理中的应用**:随着社会老龄化和人工成本的增加,服务型机器人在照顾失能老人方面的潜力逐渐显现,能够协助完成日常生活照顾和康复训练等任务。
2. **Petri网理论**:Petri网是一种用于描述离散并行系统的数学工具,能够表示进程的顺序、并发、冲突和同步。在多机器人系统中,Petri网常用于建模任务和行为。
3. **时延Petri网**:这种扩展的Petri网引入时间因素,可以预测系统状态变化的时间,如估算老人完成任务所需时间或确定机器人何时变为空闲。
4. **颜色Petri网**:通过分类资源,颜色Petri网可以简化复杂的系统描述,尤其在处理多机器人和多老人情况下的协调问题。
5. **智能体融合**:为了解决老人间的任务干扰和权限调整问题,文章提出了将智能体概念与Petri网结合,以实现更智能的决策和动态任务分配。
6. **多机器人-多任务协调框架**:此框架不仅关注机器人的行为,还考虑了被照顾者(老人)的状态和交互,提供了一个全面的协调模型。
通过这些知识点,本文为解决多机器人环境下的养老护理问题提供了一个综合的解决方案,并展示了Petri网在复杂系统协调中的灵活性和适用性。

需要强调的是: 1) 由于 STdCPN 的权重为变迁的发生提供了多种可能, 若变迁具有多
个输入库所和多个输出库所, 会造成变迁发生时权重选择混乱, 因此在使用 STdCPN 建模
时应避免这种情况的发生, 可以通过如增加中间库所等方式实现. 2) 为了使标识可以明确
地表示系统当前状态以及防止老人之间相互影响, 当多块令牌处于同一库所内时, 除任务开
始前(p1p1、p4p4)和结束后(p16p16)以及存储机器人的库所(p2p2、p3p3)内的令牌可以叠加
外, 在任务执行过程中, 令牌均不可以叠加, 而是按照各自的进度前进.
该 STdCPN 子模型建立后, 模型的运行会指示 SR 和 CR 需要完成的动作以及它们之
间动作的顺序, 从而协调 2 台异构的服务机器人帮助老人完成任务. 通过该 STdCPN 子模
型可以清楚地了解任意时刻系统中每位老人与每台机器人所处的状态以及他们间的联系,
即可以清楚地知道哪一(几)台机器人正在为哪一位老人服务到哪一个阶段, 这样就可以对整
个系统有一个精准的把控, 并可对系统状态进行时间上的预测, 这些信息都将作为智能体进
行任务规划时的依据. 且 STdCPN 模型的“可扩展性”能够满足实际应用中老人和机器人数
量的扩展以及对他们权限的限制, 由于 STdCPN 运行过程中并不涉及似矩阵求逆般耗时的
计算, 因此由老人和机器人数量扩展导致的模型中向量和矩阵维度的增加对模型的运行不
会造成很大的影响. 可以组合多个 STdCPN 子模型来构成完整的养老院运行模型, 作为养
老院情境下多机器人 − 多任务协调的基础.
2. 服务对象满意度建模
当 STdCPN 模型搭建完成后, 在机器人资源充足时, 老人们均可以按照自己的需求随
时进行各种任务. 但在现实情况中难免会有短时间内多位老人接连提出需求甚至同时提出
需求的情况, 按此情形配置机器人数量会造成大量冗余. 但如果机器人资源不够充足, 系统
将陷入僵局. 由于每位老人的身体状况不同, 所执行的任务紧急程度也不同, 盲目地按照老
人提出需求的顺序来执行任务可能会造成一些不良后果. 同时由于该过程服务于人, 那么应
该从人的角度出发考虑, 找出能够让老人们整体更满意的解决方案. 因此通过对养老院情境
的模拟以及该情境下老人心理的分析, 提出了如下服务对象满意度模型. 在该模型中, 将任
务分为不同的优先级, 并将老人的性格急躁程度分为不同等级. 假设在机器人帮助老人完成
一项任务后, 老人会根据此次任务的执行情况得出一个他心中的满意度. 认为在该情境下,
任务的优先级、老人的性格急躁程度、老人呼叫后的等待时间以及机器人运载老人的速度
与老人的舒适速度之差都会对老人的满意度造成影响. 建立的满意度模型如式(1)所示:
SatfX,ex,k,n=α0Priorex−α1ImpatX⋅eα2twait,X,ex,k,n−α3eα4(vX,ex,k,n−v∗x)SatfX,ex,k,n=α0Priorex−α1ImpatX⋅eα2twait,X,ex,k,n−α3eα4(vX,ex,k,n−vx∗)
(1)
式(1)中 SatfSatf 为老人的满意度, XX 代表老人, exex 代表该老人要做的事件是事件
xx, kk 代表在当前队列中该老人排在第 k 位, nn 代表共有 n 位老人在队列中. PriorPrior 代
表事件优先级, 这里将所有事件分成五个等级, Prior∈{0,1,2,3,4}Prior∈{0,1,2,3,4}, 其中“4”
为优先级最高的等级. ImpatImpat 代表老人性格急躁系数, 由于目前无法对性格急躁程度进
行定量测量, 假设性格急躁程度最低的人急躁系数为“1.0”, 该系数随着老人急躁程度的提
升而增加, 暂定为五个等级, Impat∈{1.0,1.1,1.2,1.3,1.4}Impat∈
剩余51页未读,继续阅读
2012-06-12 上传
2023-02-27 上传
2023-07-24 上传
2023-08-17 上传
2023-06-14 上传
2023-02-16 上传
2023-06-07 上传
2023-05-23 上传

罗伯特之技术屋
- 粉丝: 4406
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
