基于蚁群算法的足球机器人动态避障路径优化策略
本文主要探讨了"基于蚁群算法的足球机器人避障方法",针对足球机器人在实时、连续和动态环境中进行路径规划的问题。足球机器人比赛中,避障路径规划是一项复杂任务,因为障碍物的运动具有不确定性,传统的人工势场方法虽然有一定的避障能力,但在保证避开障碍的同时可能无法确保快速精确地到达目标。
文章的核心思想是利用蚁群算法进行路径规划,这种方法的优势在于其自适应性和全局优化特性。蚁群算法模仿了蚂蚁群体寻找食物的行为,通过个体之间的信息交流(称为信息素)来寻找最短或最优路径。在这个足球机器人避障方案中,作者首先建立了一个路径模型,将起点、路径点和目标点连接起来,形成一系列可能的路径。通过定义选择概率函数和聚度函数,蚁群算法能够指导机器人优先选择那些更接近目标且障碍较少的路径。
在具体实施中,作者提出了一种策略,即在移动目标轨迹上随机选取一个点,然后规划一条最优路径到达这个点。接着,机器人会沿着这条路径前进,并根据当前情况自适应地更新策略,确保在避开障碍的同时,尽快与目标点会合,实现时间最短的目标。这种动态调整的策略有助于避免陷入局部最优,提高整体搜索效率。
文中还提到了路径模型的建立,通过障碍物模型来表示行走路线,以及如何确定机器人可供选择的路径数量,这都是路径规划中的关键步骤。通过这些技术手段,作者的研究表明基于蚁群算法的足球机器人避障方法在实际应用中是可行且有效的,对于提高足球机器人的自主导航性能具有重要意义。
这篇文章深入研究了如何结合蚁群算法解决足球机器人在复杂环境中的动态避障问题,提供了一种创新且实用的路径规划策略,对于相关领域的研究者和工程师具有很高的参考价值。
第 26卷第 3期
Vo1.26,No.3
西 华 大 学 学 报 · 自 然 科 学 版
Journal of Xihua University‘Natural Science
20o7年 5月
May 2007
文章编号 :1673—159X(2o07)o3—0086—04
基于蚁群算法 的足球机器人避 障方法
邓星桥 ,王进戈,朱维兵,隆沅庭
(西华大学机械工程与 自动化学 院,四川 成都 610039)
摘 要:将蚁群算法用于针对运动 目标的足球机器人动态 避障路径 规划 ,采用 自适 应更新策略 的方 法规划最
佳避障路径 ,建立 了严谨、简洁的选择概率 函数和聚度 函数 ,以达到对足球机 器人 避障路径 的最优化。大量仿真实
验表明 ,该方法可行有效 。
关键词 :足球机器人 ;蚁群算法 ;避障 ;路径规划
中图分类号 :TP24 文献标识码 :A
足球机器人比赛表现为实时、连续和动态环境
下的多 Agent冲突 、合作及协调[¨。由于障碍物运
动的不确定性,决定 了避 障路径规划是复杂的非线
性问题,传统 的人工势场避 障方法具有一定的避 障
能力 ,但并不一定能保证在有效避开 障碍物后准确
快速地到达 目标。为此 ,本文在机器人足球系统 中
设计了一个基于蚁群的避障方案。在考虑球场边界
约束 、动态避障和时间最短要求 的条件下 ,针对移动
目标,就机器人的路径规划进行 了研究 。首先 以移
动 目标轨迹上 的某一随机点为 目标放置生物激素 ,
规划一条最佳路径 ,从移动 目标轨迹上搜索出最优
点并 自适应地更新策略以保证机器人先以最佳路径
到达该点,再沿 目标轨迹与 目标点会合,整个过程用
时最短 。
1 足球机器人 的路径规划
1.1 路径模 型的建 立
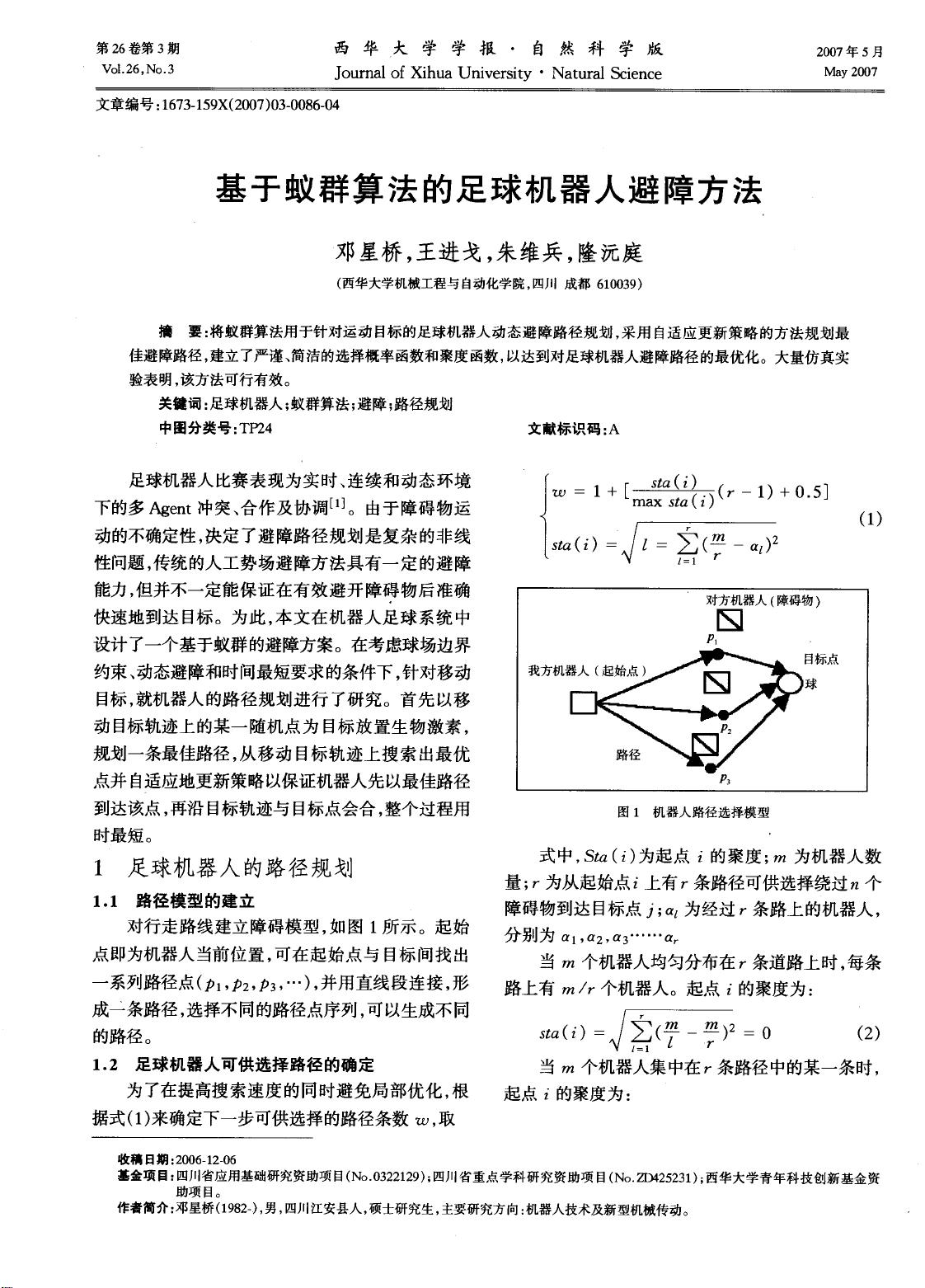
对行走路线建立障碍模型,如图 1所示。起始
点即为机器人当前位置 ,可在起始点与 目标间找出
一
系列路径点(P1,P2,P3,…),并用直线段连接 ,形
成 条路径,选择不同的路径点序列,可 以生成不 同
的路径 。
1.2 足球 机器 人可供 选择 路径的确定
为了在提高搜索速度的同时避免局部优化 ,根
据式(1)来确定下一步可供选择的路径条数 叫,取
叫 = 1+[
m a
s
x
ta ( i)
2
r r一1)+0。5]
ta(i) √ ( ~ 一 (1)
图 1 机器人路径选择模型
式中,Sta(i)为起点 i的聚度; 为机器人数
量 ;r为从起始点 i上有 r条路径可供选择绕过 个
障碍物到达 目标点 J;a 为经过 r条路上的机器人 ,
分别为 口1,口2,口3……口
当 个机器人均匀分布在 r条道路上时 ,每条
路上有 /r个机器人。起点 i的聚度为:
厂 _——————一
ta(i)=√∑( 一 ) =0 (2)
当 个机器人集中在 r条路径中的某一条时 ,
起点 i的聚度 为 :
收稿 日期 :2006—12—06
基金项 目:四川省应用基础研究资助项 目(No.0322129);NJll省 重点学科研 究资助项 目(No.ZD425231);西华大学青 年科技创新 基金资
助项 目。
作者简介:邓 星桥 (1982一),男,四川江安县人 ,硕士研究生 ,主要研究方向 :机器人技术及新型机械传动。
, ● , ● ●● ● ● / 、 ● ● ● ● ,
维普资讯 http://www.cqvip.com
下载后可阅读完整内容,剩余3页未读,立即下载
2022-07-15 上传
237 浏览量
2021-05-08 上传
点击了解资源详情
点击了解资源详情
2023-04-25 上传
2023-06-06 上传
2023-06-17 上传
2020-02-29 上传

andyzt406
- 粉丝: 5
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创建个性化的Discord聊天机器人教程
- RequireJS实现单页应用延迟加载模块示例教程
- 基于Java+Applet的聊天系统毕业设计项目
- 从HTML到JSX的转换实战教程
- 轻量级滚动到顶部按钮插件-无广告体验
- 探索皇帝多云的天空:MMP 100网站深度解析
- 掌握JavaScript构造函数与原型链的实战应用
- 用香草JS和测试优先方法开发的剪刀石头布游戏
- SensorTagTool: 实现TI SensorTags数据获取的OS X命令行工具
- Vue模块构建与安装教程
- JavaWeb图片浏览小程序毕业设计教程
- 解决 Browserify require与browserify-shim冲突的方法
- Ventuno外卖下载器扩展程序使用体验
- IIT孟买医院模拟申请webapp功能介绍
- 掌握Create React App: 开发Tic-Tac-Toe游戏
- 实现顺序编程与异步操作的wait.for在HarmonyOS2及JavaScript中
